

Robô controlado por micro:bit
Publicado em 12 de Maio de 2026 às 18:24
Você já imaginou transformar um micro:bit em um controle remoto para comandar um carrinho robótico?
Neste projeto, vamos montar um carrinho controlado por rádio usando duas placas micro:bit: uma será o controle remoto e a outra ficará no robô. O carrinho usa dois motores DC, uma ponte H e uma estrutura simples que pode ser feita com materiais de baixo custo, peças reaproveitadas ou componentes de kits educacionais.
A proposta foi inspirada em uma atividade da disciplina Engenharia, Sustentabilidade e Impacto Social, do curso de Engenharia de Controle e Automação, em um contexto de desenvolvimento de robôs para monitoramento de biomas. O material-base apresenta a montagem eletrônica com micro:bit + ponte H, além dos programas separados para o robô e para o controle.
Objetivo do projeto
O objetivo é construir um carrinho robótico simples, capaz de receber comandos sem fio enviados por outro micro:bit.
Ao final do projeto, o carrinho deverá ser capaz de:
- parar;
- girar ou mover uma das rodas;
- mover a outra roda;
- andar para frente usando os dois motores;
- receber comandos por rádio a partir de outro micro:bit.
Mais do que apenas montar um robô, este projeto ajuda a entender conceitos importantes de eletrônica, programação, comunicação sem fio, controle de motores e documentação de projetos maker.
Como funciona?
O projeto usa dois micro:bits. O primeiro micro:bit funciona como controle remoto. Quando o usuário aperta os botões, ele envia números por rádio. O segundo micro:bit fica instalado no carrinho. Ele recebe esses números e aciona os motores por meio da ponte H. A ponte H é necessária porque o micro:bit não consegue alimentar diretamente os motores DC. Ela funciona como uma “interface de potência”: recebe sinais de controle do micro:bit e fornece a energia necessária para os motores girarem.
Materiais Necessários
- 2 placas micro:bit
- 1 ponte H, como L298N ou módulo equivalente
- 2 motores DC com caixa de redução
- 2 rodas compatíveis com os motores
- 1 suporte de pilhas ou bateria para os motores
- 1 protoboard ou placa de conexão
- vários jumpers macho-macho e macho-fêmea
- 1 chassi para o carrinho
- 1 rodízio, esfera ou apoio frontal/traseiro
- opcional papelão, MDF, impressão 3D, peças LEGO ou material reaproveitado
Ferramentas Necessárias
- Chave de fenda
- Alicate
Etapas
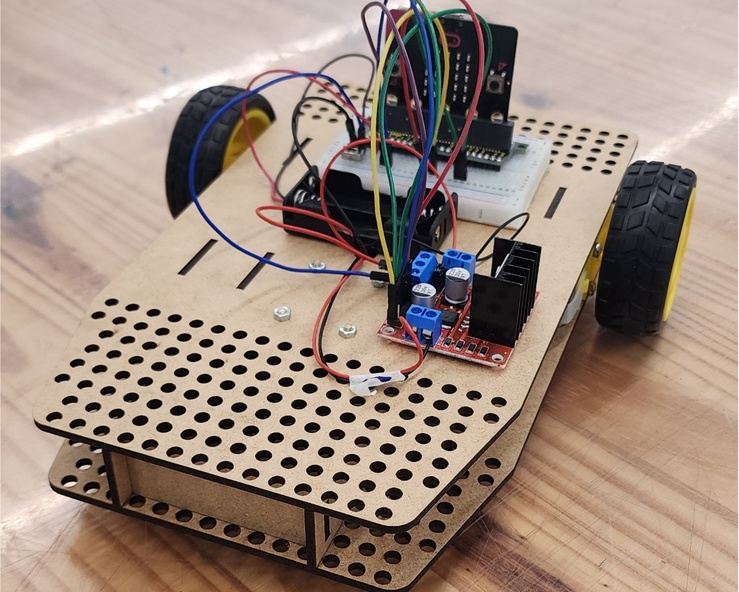
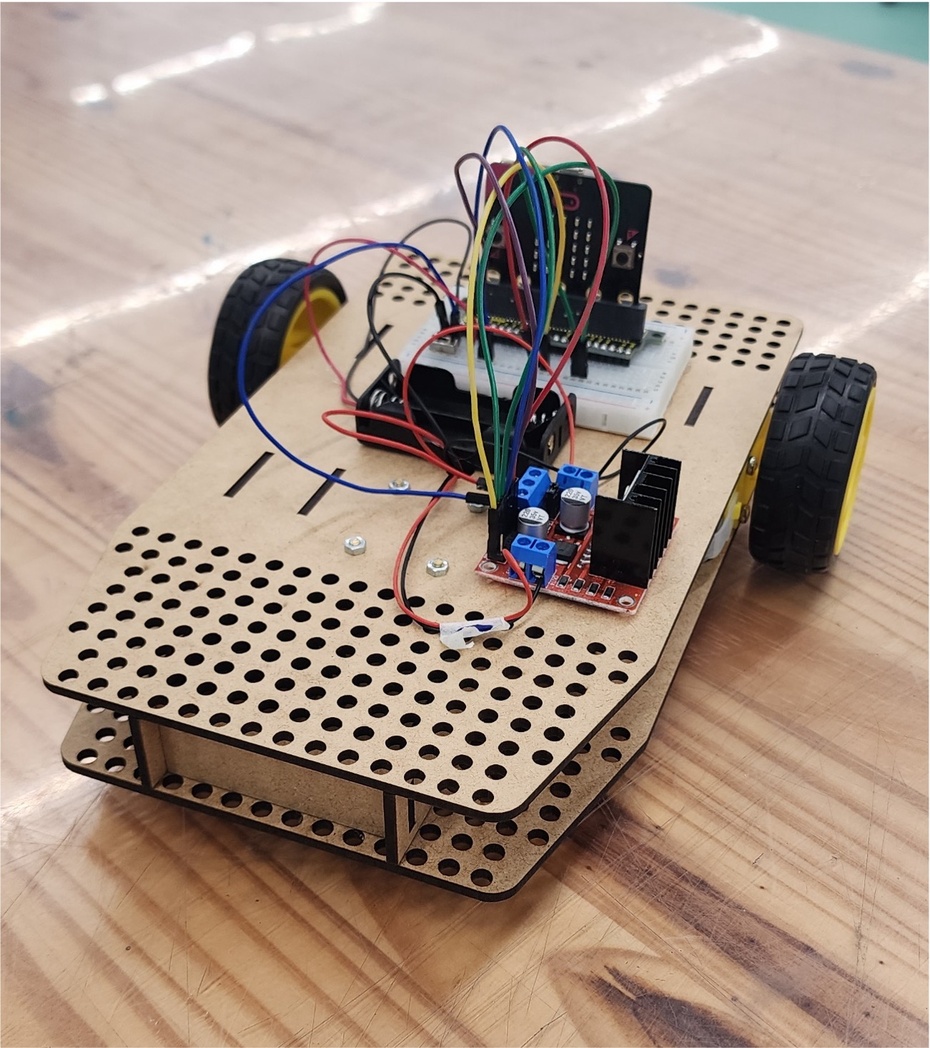
Construção do Robô
-
Montagem Mecânica
O chassi pode ser construído de várias formas. Você pode usar papelão rígido, MDF cortado a laser, peças impressas em 3D, peças de kits educacionais ou materiais reaproveitados. O mais importante é que a estrutura mantenha os motores bem fixados e permita que as rodas girem livremente.
-
Montagem eletrônica
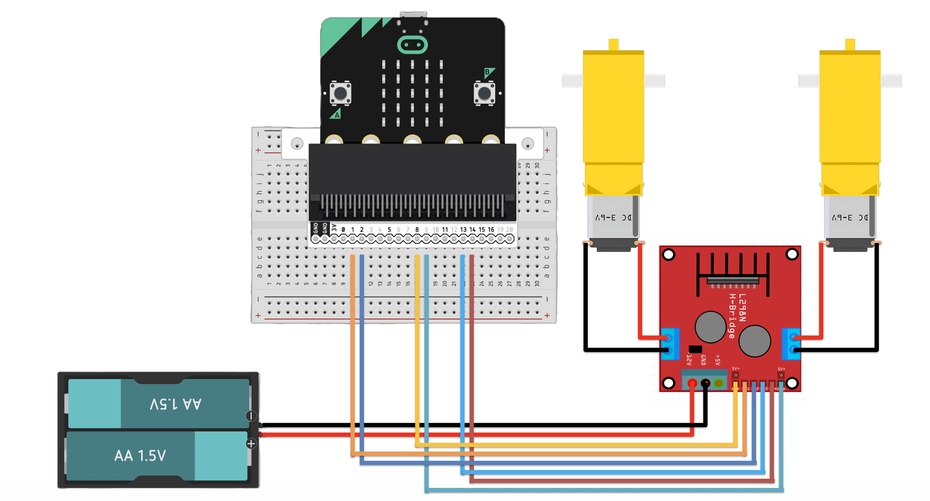
A montagem eletrônica pode ser dividida em três partes:
- conexão do micro:bit com a ponte H;
- conexão da ponte H com os motores;
- alimentação dos motores com uma fonte externa.
O micro:bit envia sinais para controlar os dois motores por meio de pinos digitais e pinos analógicos/PWM. A ponte H recebe esses sinais e aciona os motores.
Uma possível ligação da Ponte-H e do micro:bit é:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P1
- Sentido do motor esquerdo - IN2: P2
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P13
- Sentido do motor direito - IN4: P14
Atenção: confira sempre a pinagem do seu módulo de ponte H. Alguns módulos podem ter nomes ou posições diferentes para os pinos.
Programação do robô
-
O micro:bit controlador do robô
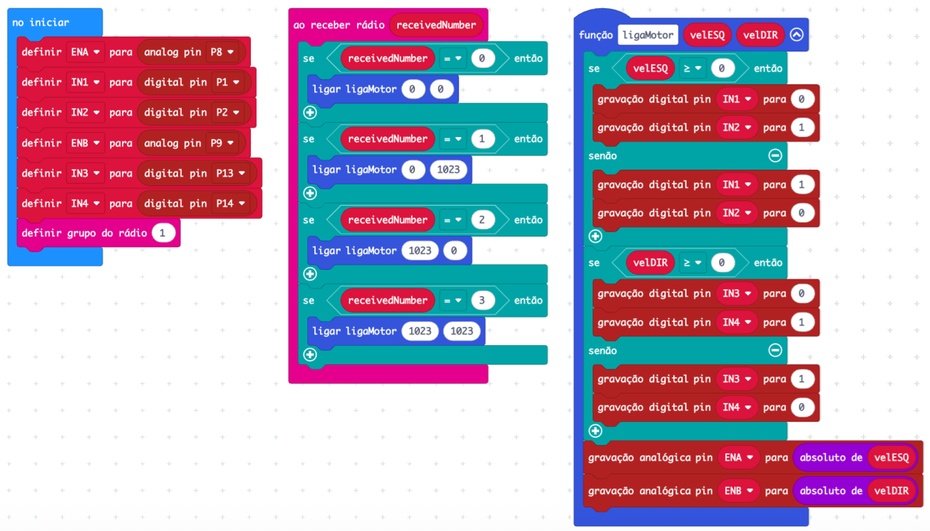
O micro:bit instalado no robô deve receber comandos por rádio e transformar esses comandos em movimento.
No programa, primeiro se configura os pinos usados para controlar a ponte H, define o grupo do rádio como 1 e executa uma função para ligar os motores conforme o número recebido. A seguir é apresentado a lógica do programa do robô, incluindo os comandos recebidos por rádio e a função de acionamento dos motores.
Uma lógica simples para controle do robô pode ser:
- Ao receber 0: parar
- Ao receber 1: acionar motor direito (virar para esquerda)
- Ao receber 2: acionar motor esquerdo (virar para direita)
- Ao receber 3: andar para frente
Essa lógica pode ser modificada depois para incluir comandos como ré, giro para esquerda, giro para direita ou controle de velocidade.
-
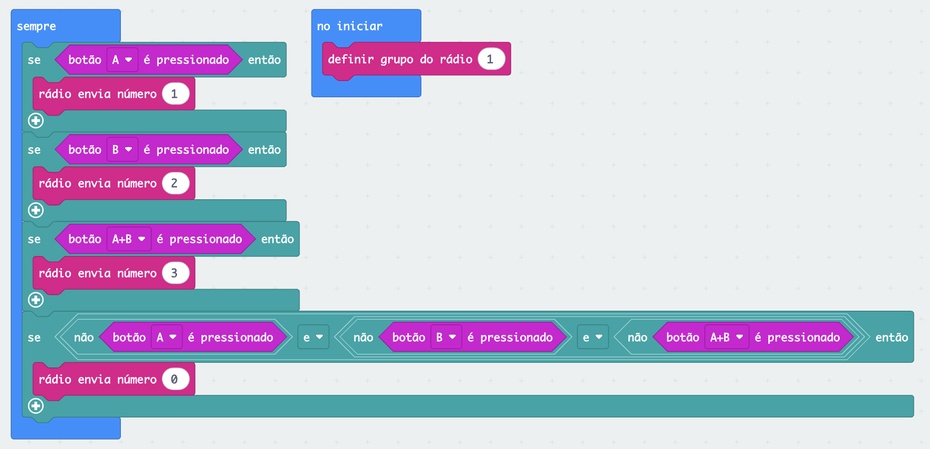
O micro:bit do controle
O segundo micro:bit funciona como controle.
No programa do controle também é usado o grupo de rádio 1 e é enviados números diferentes quando os botões são pressionados.
Uma sugestão de comandos é:
- Botão A: Envia 1, gira para a esquerda
- Botão A: Envia 2, gira para a direita
- Botão A+B: Envia 3, avança para frente
- Nenhum Botão pressionado: Envia 0, robô parado
Essa é uma versão inicial simples. Depois que o carrinho estiver funcionando, você pode melhorar o controle para criar uma direção mais intuitiva.
Testes e Melhorias Possíveis
-
Testes do projeto
Antes de prender tudo no chassi, teste o circuito em etapas.
Primeiro, verifique se os dois micro:bits estão no mesmo grupo de rádio. Depois, teste se o micro:bit do robô está recebendo os números enviados pelo controle. Em seguida, conecte apenas um motor e veja se ele gira. Depois, teste o segundo motor. Só então fixe os componentes no carrinho.
Durante os testes, observe:
- os motores estão girando?
- os motores giram no sentido esperado?
- o robô anda reto?
- o comando de parar funciona?
- a alimentação dos motores está adequada?
- os fios estão bem conectados?
- a ponte H aquece demais?
Se o robô girar para o lado errado, talvez seja necessário inverter os fios de um motor ou ajustar a lógica dos pinos IN1, IN2, IN3 e IN4. -
Problemas comuns e como resolver
- Problema: O motor não gira. Possível causa: falta de alimentação externa. Solução: verifique as pilhas, a bateria e se o GND está comum entre os circuitos.
- Problema: Só um motor funciona. Possível causa: erro de ligação ou motor com problema. Solução: teste o motor e os fios separadamente.
- Problema: O robô gira em vez de andar reto. Possível causa: motores girando em sentidos opostos. Solução: inverta os fios de um dos motores ou ajuste o programa.
- Problema: O robô não responde ao controle. Possível causa: grupo de rádio diferente nos dois micro:bits. Solução: confira se os dois micro:bits estão usando o mesmo grupo de rádio.
- Problema: O movimento está fraco. Possível causa: pilhas descarregadas ou alimentação inadequada. Solução: troque as pilhas ou utilize uma fonte de alimentação adequada para os motores.
- Problema: O micro:bit reinicia durante o funcionamento. Possível causa: o motor está puxando muita corrente. Solução: separe a alimentação do micro:bit da alimentação dos motores e confira se o GND está comum. -
Melhorias possíveis
Depois que a versão básica estiver funcionando, você pode evoluir o projeto.
Algumas ideias:
- adicionar comando de ré;
- controlar a velocidade dos motores;
- criar um chassi personalizado;
- usar sensor ultrassônico para evitar obstáculos;
- adicionar LEDs indicadores;
- criar uma garra ou mecanismo simples.
Conclusão
Este robô controlado por micro:bit é um ótimo primeiro projeto de robótica, porque combina montagem física, eletrônica básica, programação em blocos e comunicação sem fio.
Mesmo sendo simples, ele apresenta ideias muito importantes: o micro:bit envia comandos, a ponte H controla os motores e o chassi transforma tudo isso em movimento. A partir dessa base, é possível criar robôs mais completos, com sensores, autonomia e aplicações reais.
Mais importante ainda: ao documentar o projeto, você transforma uma montagem em uma experiência de engenharia. Outros estudantes podem aprender com suas escolhas, seus erros, seus testes e suas melhorias.
Comentários
1bem legal!