

Rolinho | Robô desviador de obstáculos e controlado por controle remoto.
Publicado em 27 de Março de 2026 às 23:36
Rolinho, um robô que pode desviar de obstáculos por conta própria, olhando para os lados e verificando qual é o caminho mais longo para seguir.⬆️ Ele também tem o modo automático, onde você pode controlá-lo por meio de um controle remoto de televisão ou com aqueles que vêm em kits infravermelho!
Para acionar o modo automático, basta pressionar a tecla 1 do seu controle! Para ativar o controle manual, aperte 2 e poderá controlá-lo!🎮
Código comentado e fácil de entender.
Arquivos do Projeto
40.65 KB
Materiais Necessários
- 1Papelão grande
- 1 palito de sorvete
- 2 rodas para motor DC
- 2 motores DC
- 1 protoboard 400 furos
- 1 Arduino nano
- 1 regulador de tensão 5V (L7805CV)
- 1 sensor HC-SR04
- 1 servo motor posicional 180º
- 1 módulo receptor infravermelho KY-022
- 2 pilhas 18650
- 1 base para pilha 18650
- 1 kit com jumpers macho
- 1 kit com jumpers macho/fêmea
- 3 pinos macho
- 1 bolinha de gude
Ferramentas Necessárias
- Régua
- Estilete
- Tesoura
- Super-cola
- Bastão de cola quente
- Pistola de cola quente
- Cola líquida
Etapas
Preparando as peças.
-
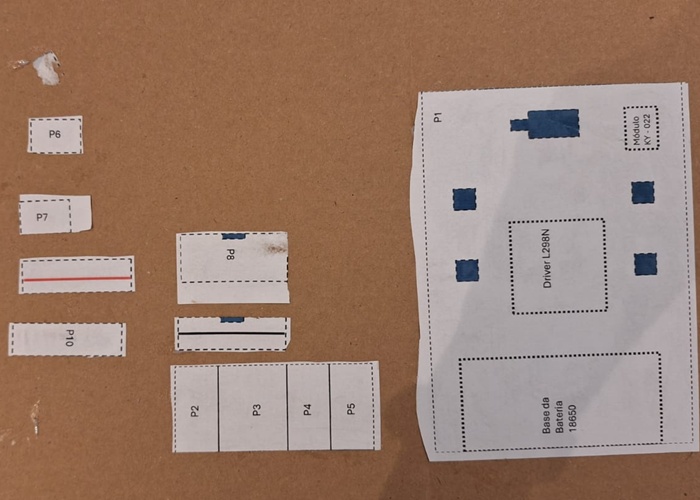
Imprima o arquivo PPTX em uma folha sulfite A4.
Recorte as peças de acordo com a legenda.
Passe cola no verso dos recortes.
Cole os recortes no pedaço grande de papelão.
Espere no mínimo 1h e 30min para as colagens secarem.
-
Usando seu estilete e sua régua, corte as peças do papelão, respeitando a legenda do arquivo PPT.
Montando o circuito principal.
-
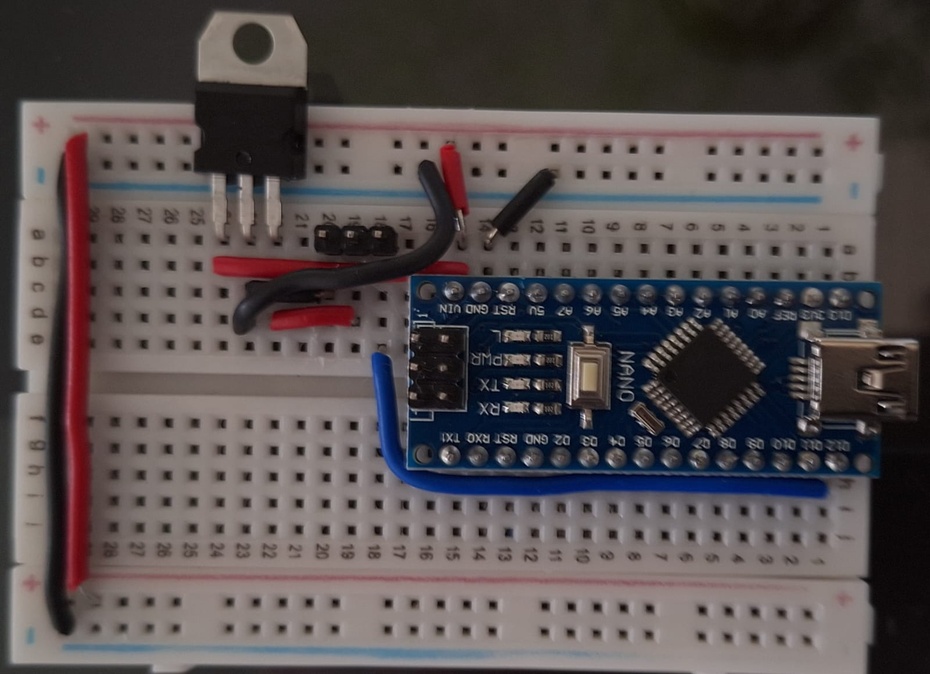
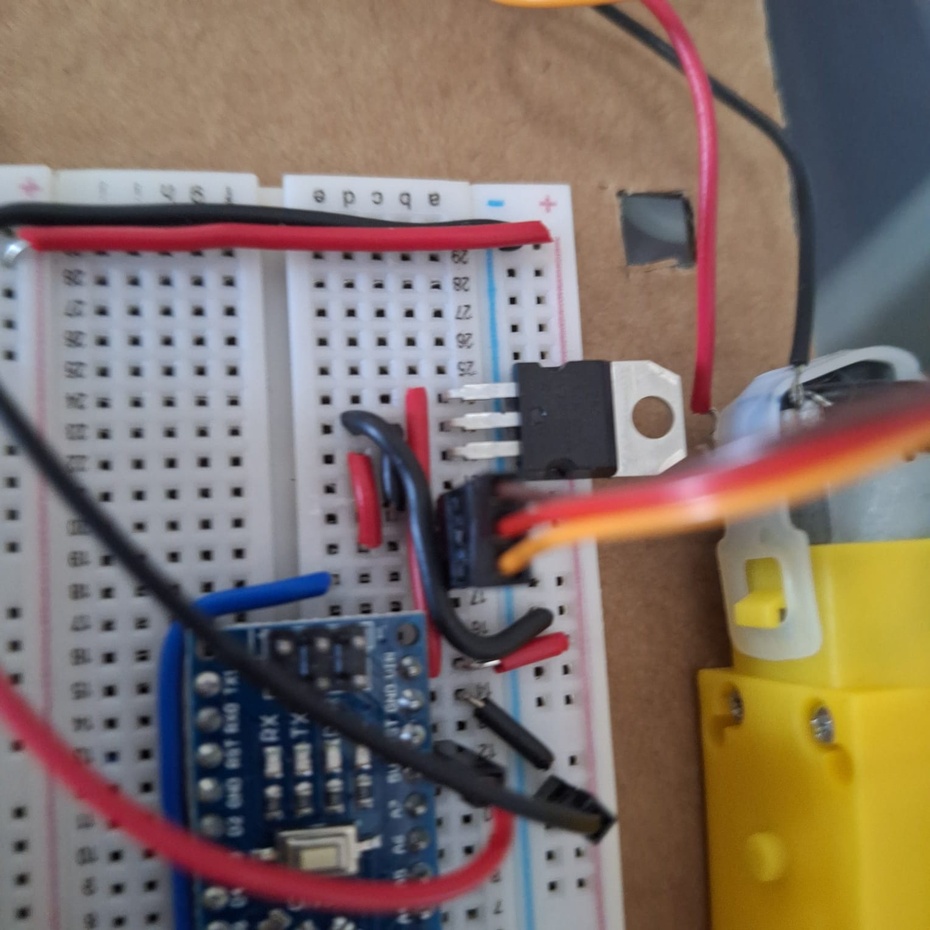
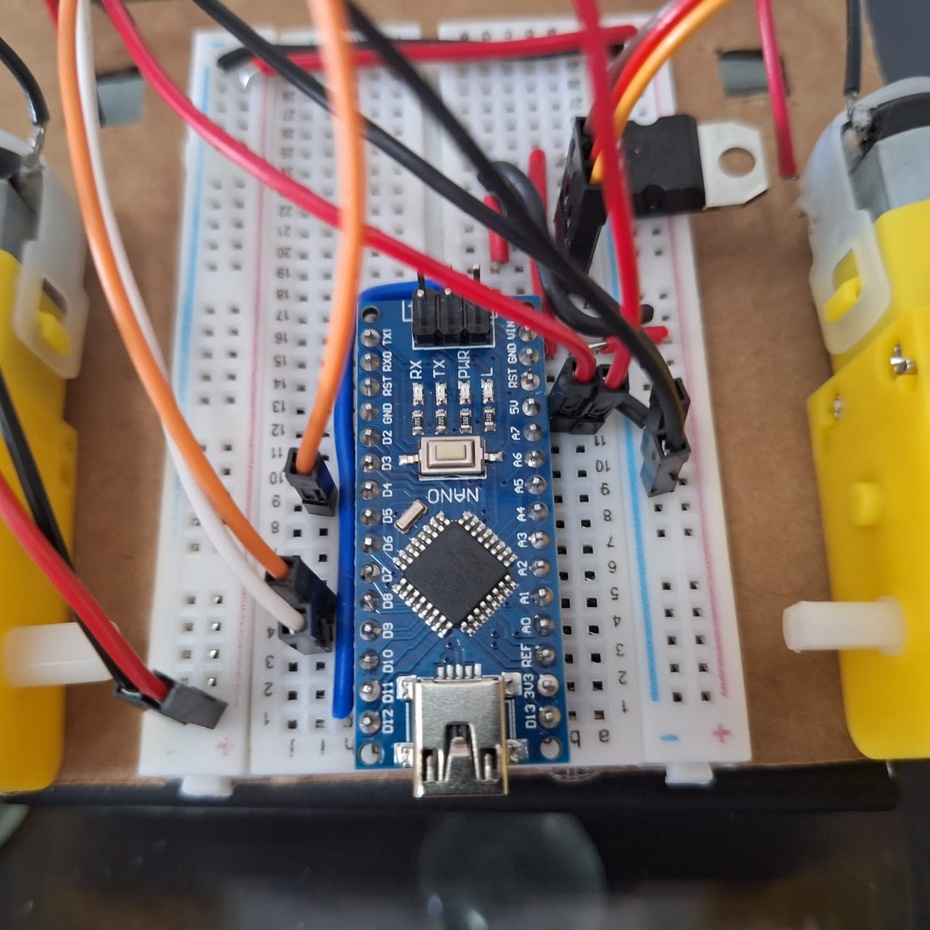
Faça o circuito da imagem abaixo na sua protoboard. Futuramente, conectaremos outros componentes no meso.
Montagem do corpo do Rolinho.
-
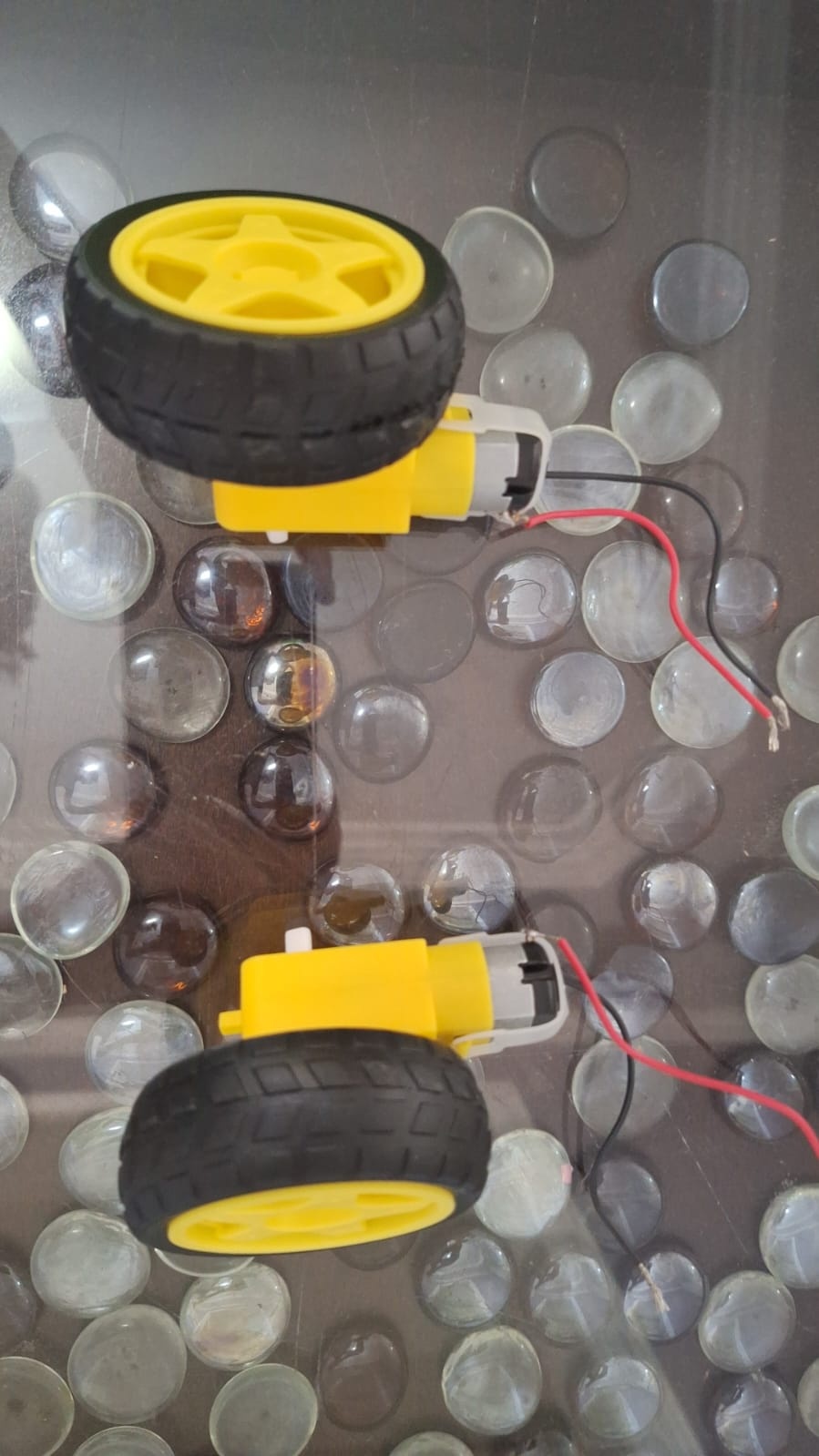
Teste a polaridade dos motores usando uma bateria para ver em qual combinação de positivo/negativo eles giram para o sentido horário/anti-horário. Sinalize esta informação nos motores usando uma caneta permanente. Depois, posicione-os de acordo com a imagem.
-
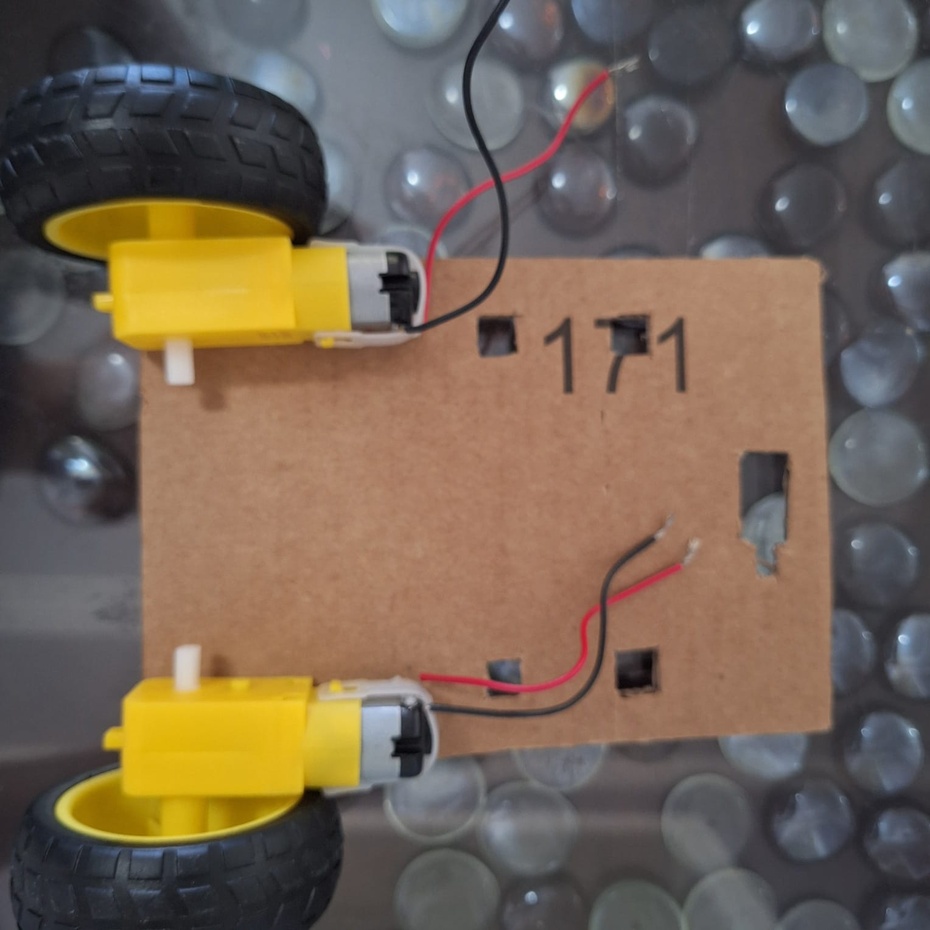
Posicione a maior peça de papelão (a base do corpo do Rolinho) embaixo dos motores com a face branca virada para baixo. Depois disso, fixe os motores nesta posição com cola quente ou fita dupla face.
-
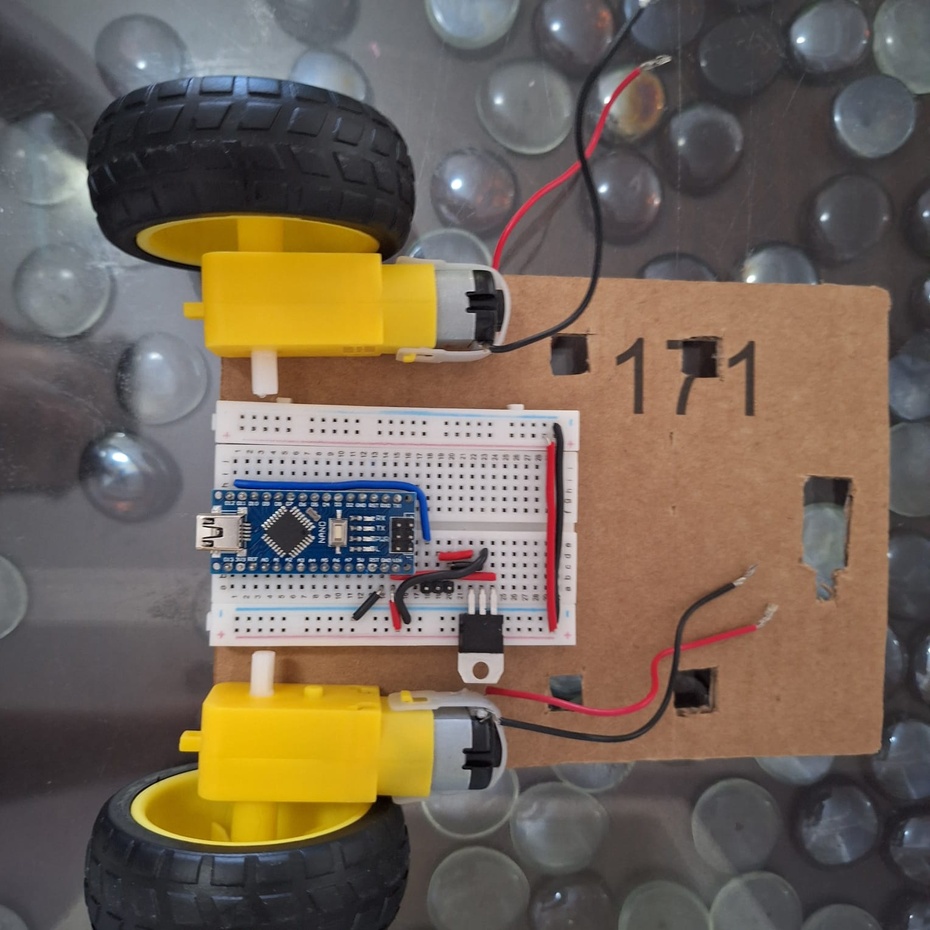
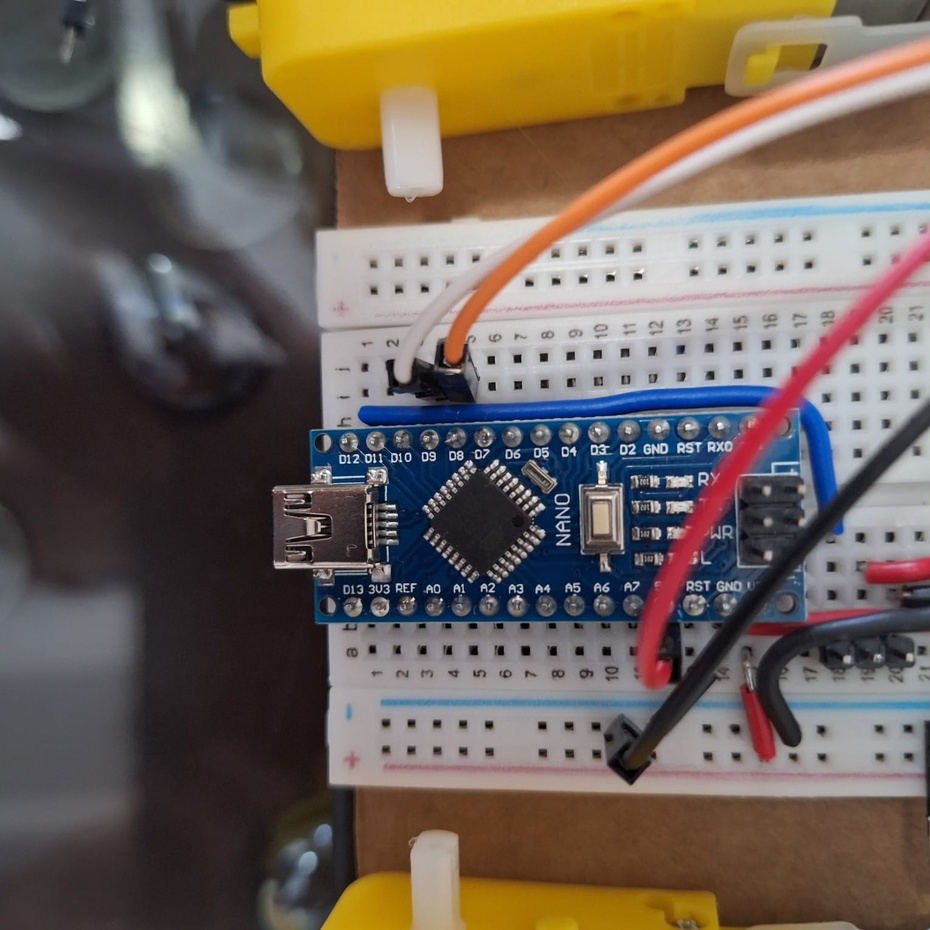
Retire o papel protetor abaixo da protoboard, expondo seu lado adesivo. Cole-a na parte de trás do Rolinho conforme a orientação da imagem.
-
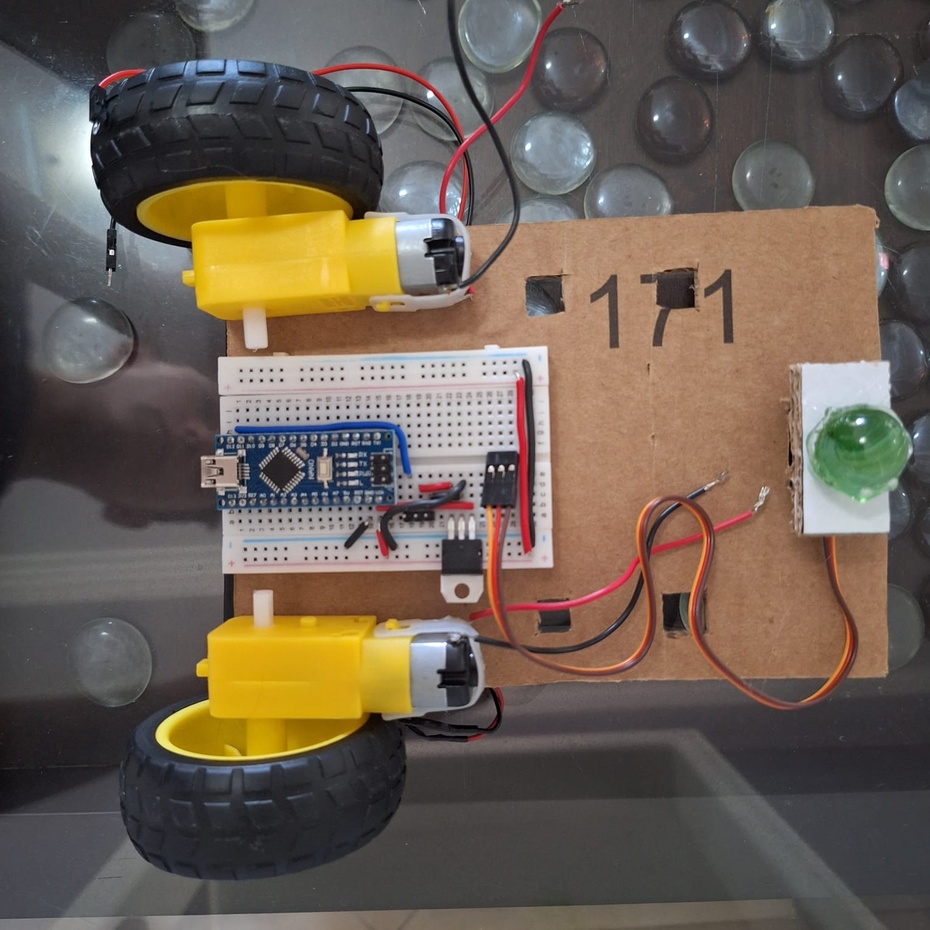
Cole, usando cola quente, a bolinha de gude sobre a peça número 5.

-
Cole esta peça embaixo do servo motor. Após isso, fixe tudo isso na peça número 1.
-
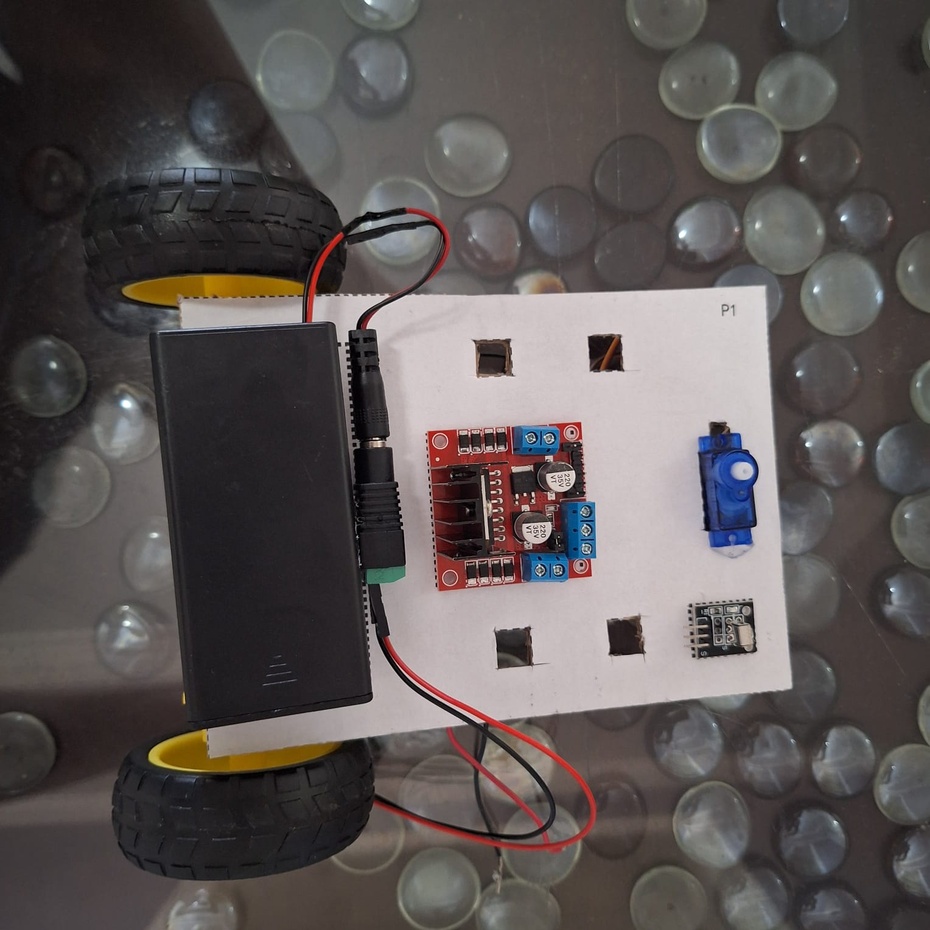
Vire o Rolinho de barriga para baixo. Cole na parte de cima nos espaços indicados o suporte para bateria 18650 SEM AS BATERIAS, o driver L298N e o módulo receptor infravermelho KY - 022. (Na imagem, é possível observar junto ao suporte para bateria um conector P4 macho e fêmea. Apenas utilizei estas peças por uma questão de versatilidade com outros projetos.)
-
Separe as peças 6 a 11 na sua mesa de trabalho.
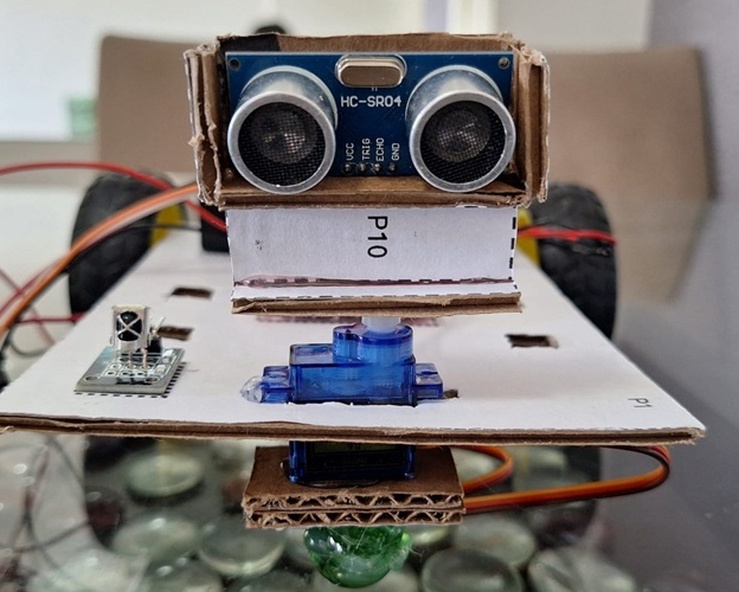
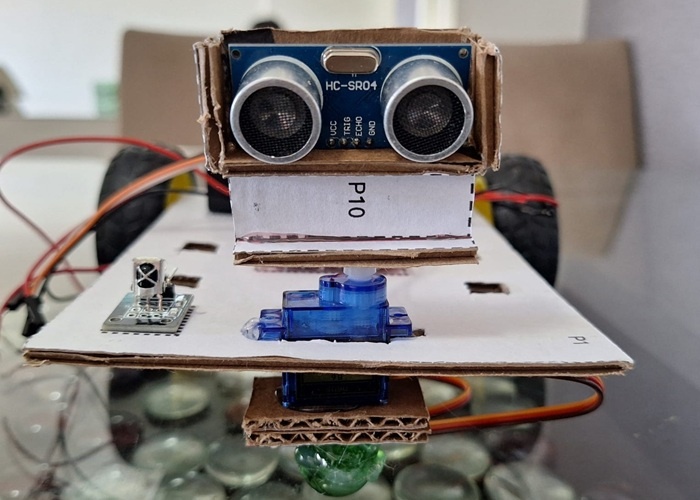
Cole com cola quente as peças 6, 7 e 8 com a peça 9 virada para baixo, de forma que crie uma estrutura semelhante a uma caixinha, onde o sensor de distância HC-SR04 será posicionado como na imagem abaixo.
Cole as peças 9, 10 e 11 respeitando as legendas do arquivo PPT.
No final destas colagens, seu suporte para o sensor de distância do Rolinho deve estar assim:

-
Cole o braço do servo motor embaixo da base da estrutura já feita.

-
Encaixe a base para o sensor de distância encima do servo motor. Agora, a parte estrutural do Rolinho está 100% completa! 😁👍 Agora, vamos conectar os fios corretamente!
-
Conecte o pino Echo do sensor de distância no pino 9, o Trigger no 8, o pino 5V na trilha positiva da protoboard e o GND na trilha negativa. PASSE OS FIOS PELO BURACO MAIS PRÓXIMO NO CANTO DIREITO DA BASE DO ROBÔ.

-
*Conexão do sensor na protoboard
-
Conecte os fios do servo motor nos 3 pinos que já estavam na protoboard.
-
Conecte o pino de sinal do sensor infravermelho no pino D4 do Arduino. O pino 5V na trilha positiva da protoboard e o GND na trilha negativa da protoboard. PASSE OS FIOS PELO BURACO ATRÁS DO SENSOR.
-
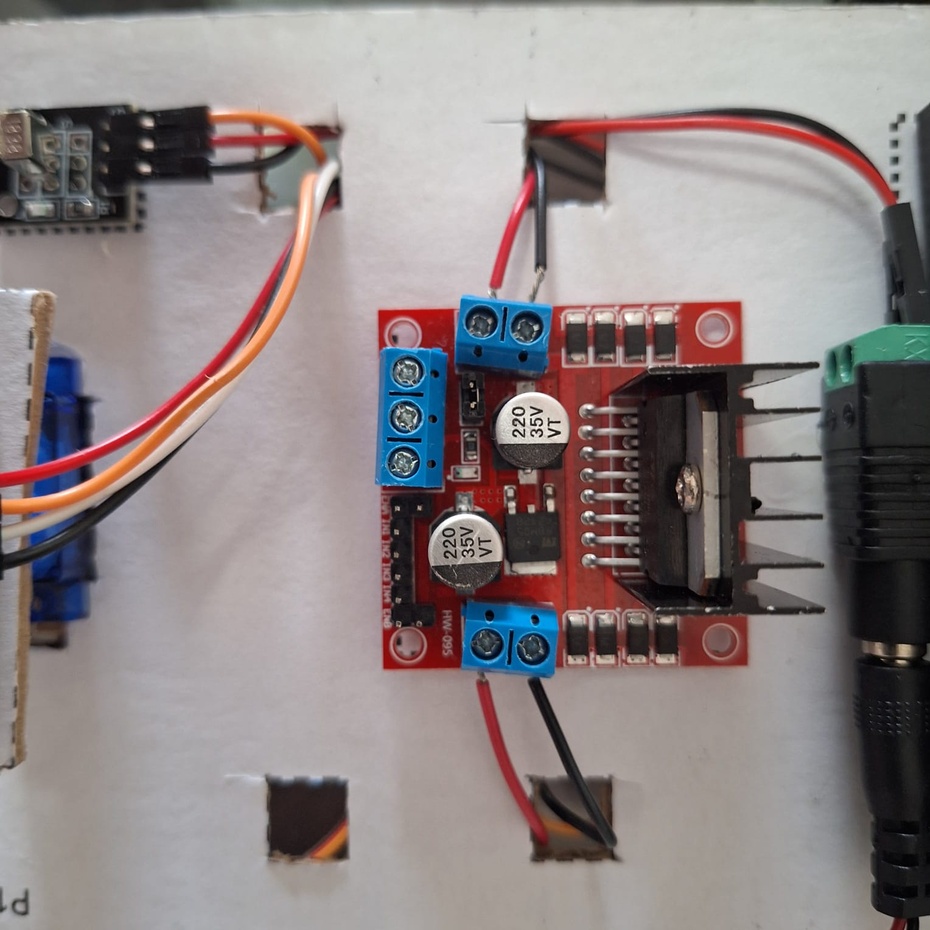
Conecte os fios dos motores nos pinos do módulo L298N, com o fio vermelho nos pinos da frente e o negativo nos pinos de trás.
-
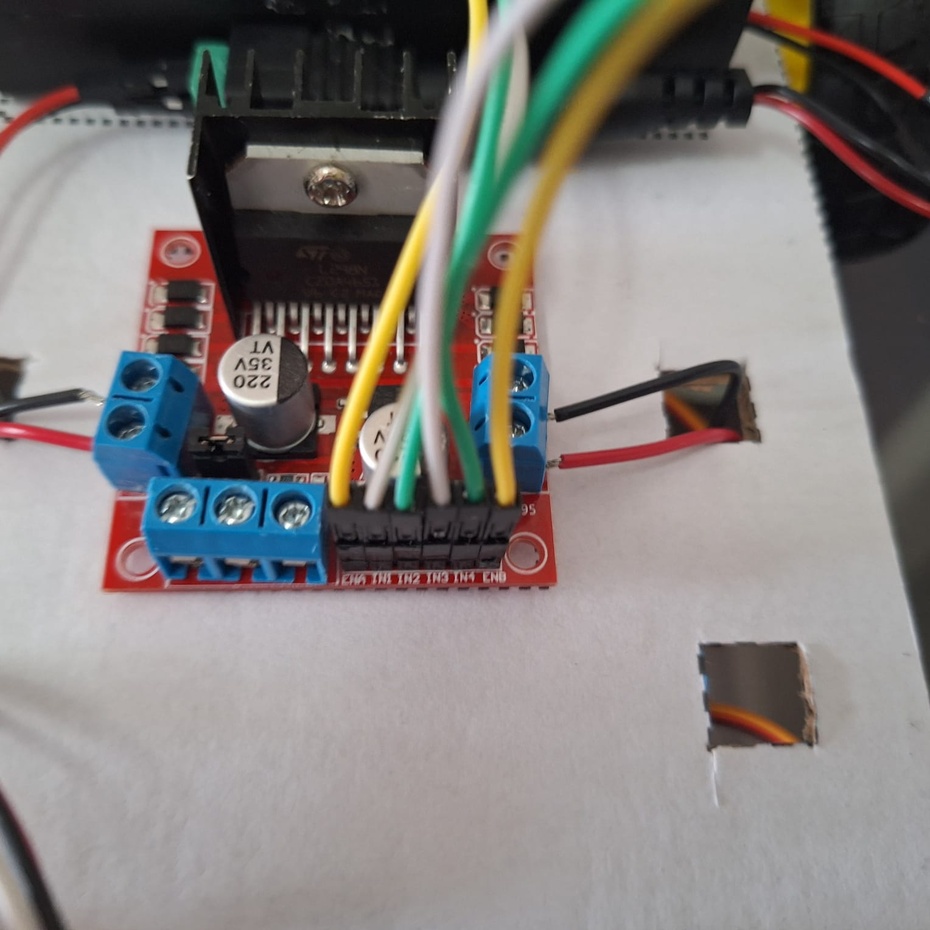
Conecte os fios de controle com o Arduino da seguinte forma:
pino 1 do motor 1 : pino 2 do Arduino
pino 2 do motor 1 : pino 3 do Arduino
pino 3 do motor 1 (amarelo esquerdo): pino 5 do Arduino
pino 1 do motor 2 : pino 10 do Arduino
pino 2 do motor 2 : pino 11 do Arduino
pino 3 do motor 2 (amarelo direito): pino 6 do Arduino
- Baixe o código no Arduino e veja o Rolinho se movimentar! Você pode alterar entre o controle manual ou automático clicando nos botões 1 e 2!
Conclusão
Dica: altere no código a velocidade de cada motor para que o Rolinho consiga andar em uma linha reta.
Se você gostou do Rolinho, que tal botar a mão na massa?
Olha, sempre quando invento de fazer um projeto, fico horas, horas, horas e horas tentando fazer a coisa dar certo, e não dá. Mas quando finalmente funciona, o prazer faz isso valer a pena. É por isso que eu gosto de fazer estes projetos: para no final de tudo, sentir o gostinho de tarefa cumprida. Você também é assim?
Comentários
2incrível, parabéns!
Este aqui é o projeto do Rolinho com o passo a passo completo de como reproduzi-lo!!!! Mantenham a história do meu primeiro robozinho viva:)