

Mouse/Joystick 6D
Publicado em 17 de Novembro de 2025 às 23:59
Joystick 6D, combinando translação (X, Y e Z) com rotação (Pitch, Roll, Yaw), feito inicialmente para uso com KSP, mas pode ser reprogramado para ser um mouse de programa CAD.
Usa 4 Módulos de joystick "KY023" e um Arduino Micro como componentes principais, mas podem ser feitos com qualquer placa que tenha suporte nativo de USB.
É uma adaptação (remix) feito originalmente em 2023, do "Space Mushroom", por shiura, principalmente para corrigir forças não simétricas geradas por causa do design.
Arquivos do Projeto
6.82 KB
1.03 KB
4.42 KB
187.61 KB
17.66 KB
498.13 KB
1.67 MB
1.57 MB
Materiais Necessários
- Qualquer filamento rígido para impressão 3D (Feito originalmente com ABS)
- 4x Módulos KY-023
- Arduino Micro (ou similar)
- 1x CD4051 (ou similar, caso o microcontrolador escolhido não tenha 8 entradas analógicas)
- Fios (total de <2m, podendo ser cabo manga, ou até cabo ethernet [~25cm equivalente])
- Solda
- Cola quente (ou fita dupla face)
- Conectores "Barra de pinos" (10 no mínimo, mais 16 se quiser usar nos joysticks, e o que for necessário para a placa de controle)
- Placa perfurada de prototipagem
Ferramentas Necessárias
- Impressora 3D (Ender 3 V2 usado no video)
- Ferro de solda (Pine64 usado no video)
- Alicate de corte
- Lâmina
Etapas
Impressão das peças 3D
-
Imprima um de cada arquivo, exceto as Bolas (4 de cada são necessário), e o Manipulador (foram incluídos os desenhos para impressão "direta" e "inversa", dependendo quão bem sua impressora faz "overhangs", ou da adesão com a mesa.
A maioria dos designs não precisa de suporte, exceto:
- O furo do parafuso no meio da base
- As abas da tampa
Pode ser impresso em ABS (observando aumentar 0.5% a proporção para compensar pelo encolhimento do ABS) ou qualquer outro filamento "rígido" (ex. PLA, PETG...)
Tempo aproximado: ~15h total - Teste o encaixe: Verifique se as Bolas se encaixam firmemente nos joysticks. E também se é possivel colocar a peça central na base, e o parafuso na peça central. Caso contrário, é possível reimprimir as peças (ou no caso da peça central, cortar o encaixe) com tamanho menor/maior, até ter um encaixe satisfatório
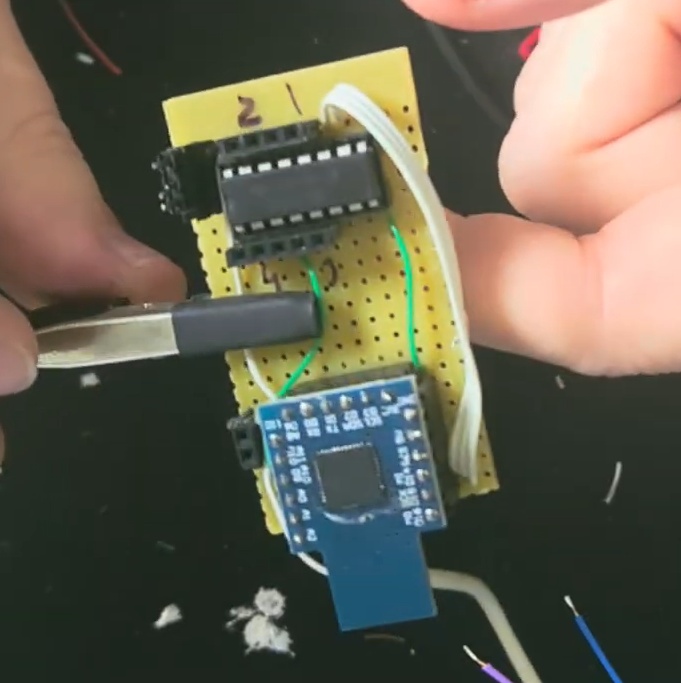
Placa de controle
-
Aqui é a etapa que vai depender do que você tem à mão. Eu usei uma placa clone do Arduino Micro como base. A única limitação é o tamanho em baixo da base, então provavelmente um Arduino Mega não vai caber. Um dos problemas no entanto é a necessidade de entradas analógicas, por isso eu adicionei o CD4051, que faz a multiplexação do pino analógico usado. Também adicionei soquetes pros componentes, mas isso não é necessário. O que é necessário mesmo é um conector para depois facilitar a conexão dos cabos do manipulador
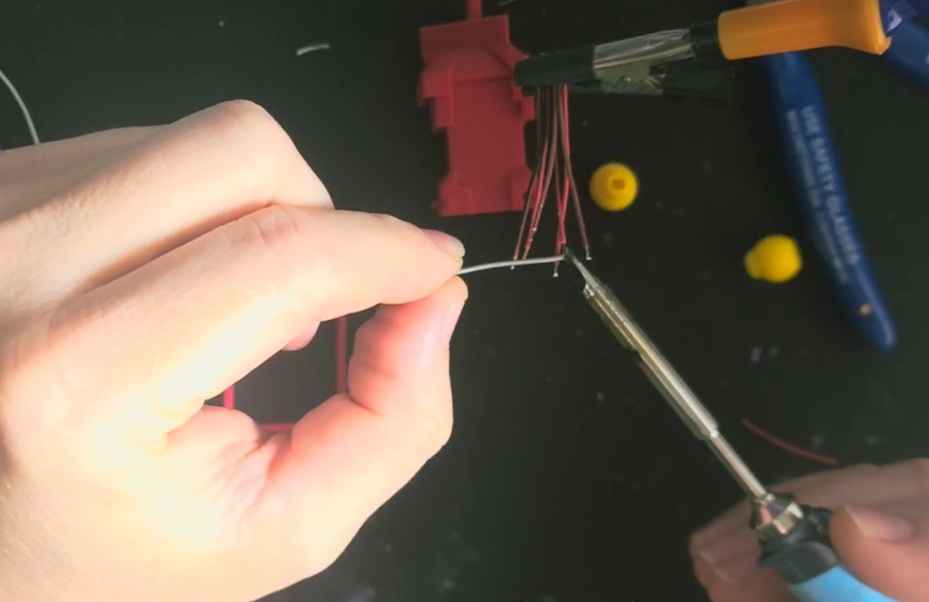
Soldagem dos joysticks
-
Prepare o cabos:
6 fios de 5cm (de preferencia com cor marrom/preto e vermelho para não errar a polaridade)
10 fios de 15cm (qualquer cor, com um par marrom/preto e vermelho pra não errar a polaridade)
Conectores para a placa
Opcional: Conectores para os joysticks -
Desencape e estanhe todas as pontas de fios. Isso vai ajudar a unir fio-a-fio depois mais fácilmente. Pode ser interessante também aplicar um pouco mais de solda nos terminais do Joystick.
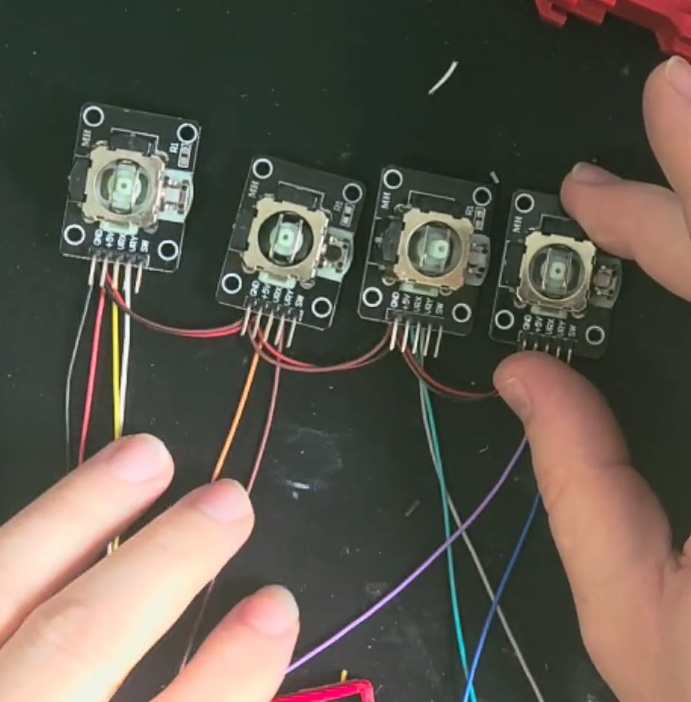
-
Solde os fios de maneira parecida com o diagrama (parte de fora da "placa"). Caso você prefira, pode soldar os fios em conectores plugados nos Joysticks, para poder trocar eles depois (no vídeo é mostrado a solda diretamente na placa).
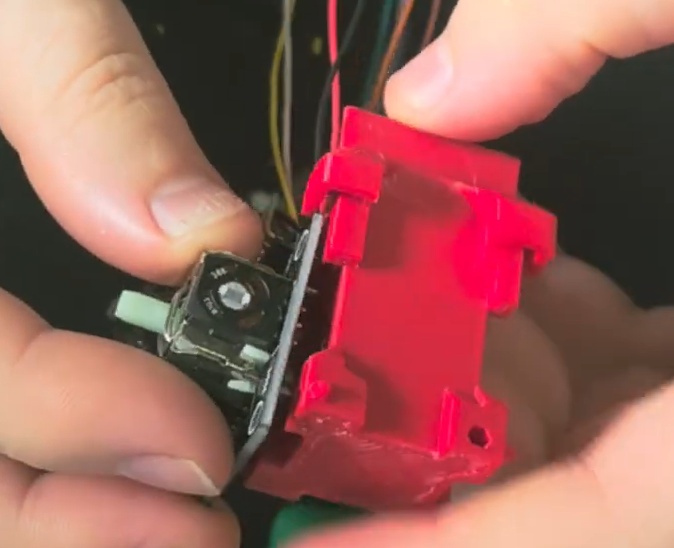
Montagem mecânica
-
Prenda os Joysticks na peça central. Você pode usar parafusos ou a peça Prendedor para isso. Ela foi feita para ter um joystick de cada lado, com os fios indo para baixo (para a base triangular).
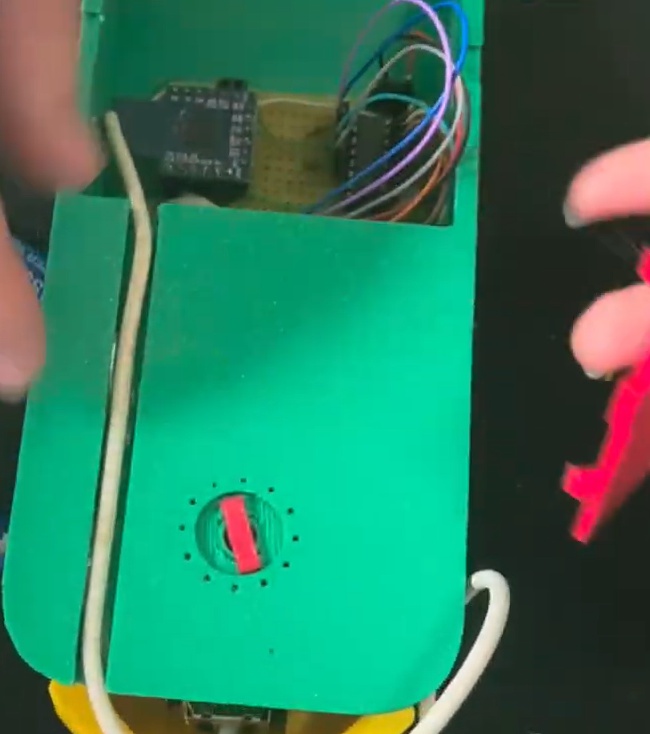
-
Passe os fios pelo furo do meio da Base. Conecte todos os cabos e cole a placa na base para evitar soltar com o movimento. Passe também o cabo USB pela parte inferior e cole.
- Use o código comentado para determinar qual pino está conectado a qual Joystick, conforme mostrado no vídeo. Não é mecânico, mas facilita não precisar desmontar depois... como no video
-
Prenda 2 das Bolas a joysticks um ao lado do outro. Coloque o Manipulador nelas e, através dos buracos, prenda as outras 2 bolas.
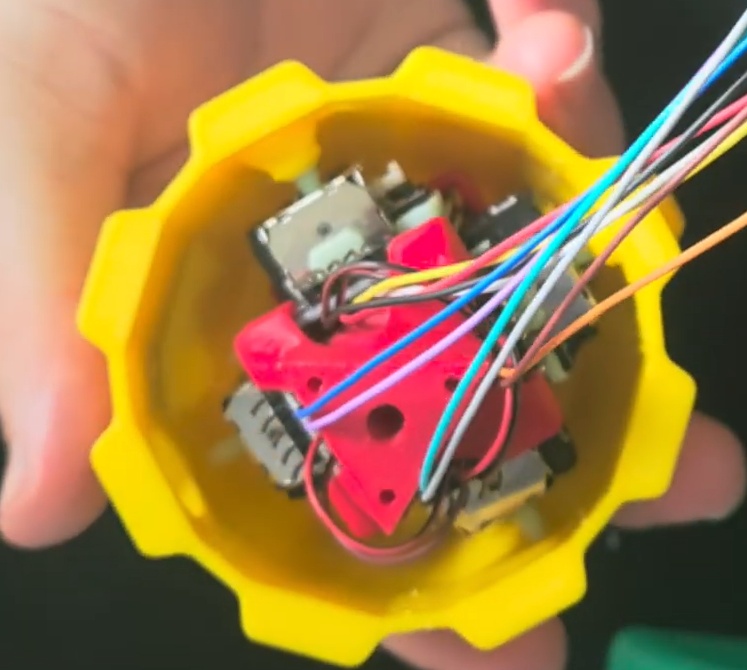
-
Parafuse o Centro na base, com o Parafuso, ou qualquer outro 1/4"x20. Feche a tampa, com ajuda de uma chave de fenda ou similar

Software!
- Use o código comentado para determinar qual pino está conectado a qual Joystick, conforme mostrado no vídeo. (colocando aqui também caso tenha pulado na parte da montagem mecânica... como no video)
- Com os pinos enumerados, grave o programa Joystick no Arduino.
Conclusão
A maior variação nesse projeto é a base, que pode usar um segurador de câmera com a rosca 1/4"x20, e o circuito de controle. O maior empecilho daí no entanto é encontrar uma biblioteca de joystick que funcione com o microcontrolador escolhido.
Comentários
0