


E se fosse possível construir um pinguim robótico que monitorasse a temperatura para espécies nativas da região? A partir da disciplina: "Engenharia, Sustentabilidade e Impacto Social", o grupo de alunos do primeiro semestre do curso de Engenharia do Instituto Mauá de Tecnologia foram encarregados de construir um animal robotizado cuja função é coletar dados para auxiliar o grupo de stakeholders escolhido. Seguindo essa inspiração, no caso do projeto "Pinguim Microbit", os alunos decidiram construir um robô capaz de medir a temperatura ambiente e locomover-se através de rodas para auxiliar na preservação de biomas terrestres, evitando o contato com áreas aquáticas devido à riscos relacionados aos componentes eletrônicos.
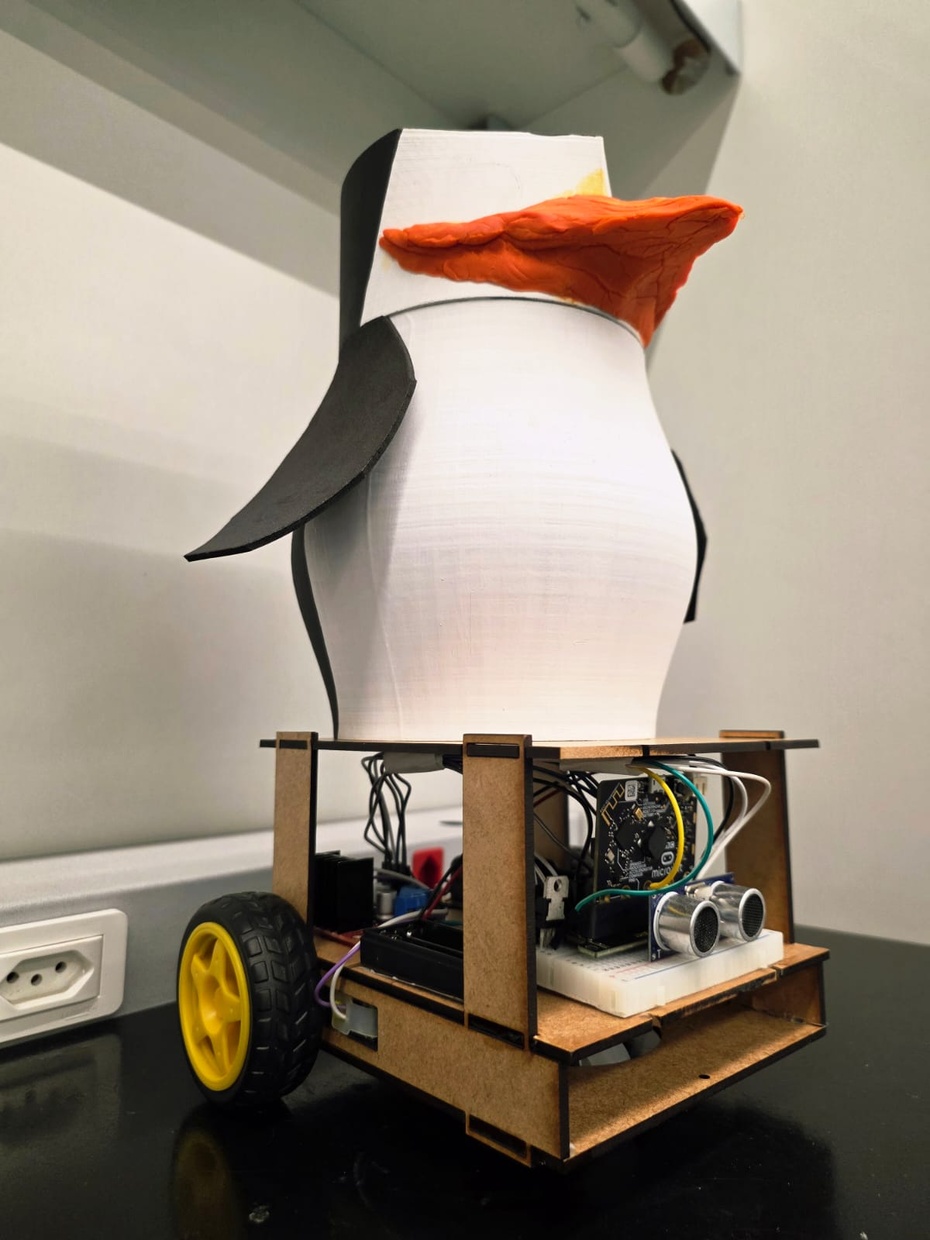
O projeto consiste em um robô em forma de um pinguim cartunesco, inspirado na animação "Pinguins de Madagascar". Tal robô possui uma estrutura de 3 andares, sendo o primeiro reservado para os motores e uma roda avulsa, o segundo destinado para os componentes eletrônicos e baterias, e o último andar consistindo no próprio pinguim cartunesco. O material-base apresenta a montagem eletrônica com micro:bit + ponte H e um sensor ultrassônico HC-SR04, além dos programas separados para o robô e para o controle.
Objetivo:
O objetivo é construir um carrinho robótico simples com características de um pinguim cartunesco, capaz de receber comandos sem fio enviados por um segundo micro:bit.
Ao final do projeto, o carrinho deverá ser capaz de:
- Mover-se para frente;
- Executar curvas para a esquerda;
- Executar curvas para a direita;
- Parar;
- Receber comandos por rádio a partir de outro micro:bit;
- Registrar a temperatura ambiente, emitindo sons quando ultrapassam um limite definido pelo usuário.
Funcionamento:
O projeto utiliza duas unidades micro:bit. O primeiro exerce a função de um controle remoto, possuindo 3 botões e 4 funcionalidades e enviando instruções na forma de números por rádio. O segundo fica instalado no próprio carrinho, recebendo os números e acionando os motores através da ponte-H, a depender do número recebido. Nesse sentido, a ponte-H torna-se necessária, uma vez que o segundo micro:bit não consegue alimentar diretamente os motores DC.
Após seguir os procedimentos descritos, o botão esquerdo do micro:bit controlador deve enviar um sinal para o carrinho exercer uma curva para a esquerda, enquanto o botão direito do mesmo micro:bit deve provocar uma curva para a direita. Além disso, ao pressionar e segurar ambos botões, esquerdo e direito, o carrinho deve seguir em frente, parando no momento em que o usuário soltar ambos botões. Finalmente, ao pressionar no botão do logotipo, o carrinho deve executar uma manobra de ré.
Materiais Necessários
- 2 placas micro:bit
- 1 ponte H, como L298N ou módulo equivalente
- 1 regulador de tensão linear, como LM7805 ou módulo equivalente
- 1 sensor ultrassônico, como HC-SR04 ou módulo equivalente
- 2 motores DC com caixa de redução
- 2 rodas compatíveis com os motores
- 1 suporte de pilhas ou bateria para os motores (o suporte de pilhas deve possuir 2 fios)
- 1 suporte de pilhas para o micro:bit (deve possuir 2 fios capazes de serem integrados à parte superior do micro:bit)
- 1 protoboard
- Ao menos 17 fios jumpers, sendo 5 macho-macho (4 para o sensor HC-SR04 e 1 para a tensão), 6 macho-fêmea (Para conectar a ponte-H ao micro:bit), 6 macho ( 2 fios jumper para cada motor, e 2 fios jumper para conectar na tensão)
- 2 ou mais placas MDF para corte (formação do chassi e suporte para o pinguim)
- 1 rodízio para apoio frontal
- Fita duas faces
- 1 Tinta acrílica preta
- 1 Tinta spray primer branca ou 1 tinta spray branca e 1 tinta spray primer cinza
- Opcional: Verniz para acabamento
- 1 pacote de Biscuit Laranja (pequeno)
- 1 EVA preto (tamanho de folha A4 ou próximo)
- 1 máscara
- 1 par de luvas
- 1 óculos de proteção
- 1 lixa para plástico
Ferramentas Necessárias
- Acesso ao software SolidWorks ou semelhante (para formação do chassi, suporte para o pinguim e o pinguim em si)
- Acesso a uma impressora 3D (com material PLA) ou conjunto de ferramentas e materiais para construir o pinguim em si
- Acesso a uma máquina de corte a laser ou ferramenta resistente o bastante para cortar MDF
- Cola quente
- Cola Super Bonder
- Alicate
- Chave de fenda Philips pequena (para parafusar a ponte-H e os motores)
- Pincel grande
- Pincel pequeno
- Tesoura
Etapas
Guia de construção
-
1. Modelagem em CAD (SolidWorks)
2. Circuito
3. Programação
4. Pintura e Características únicas
5. Montagem
6. Testes e melhorias
1. Modelagem CAD
-
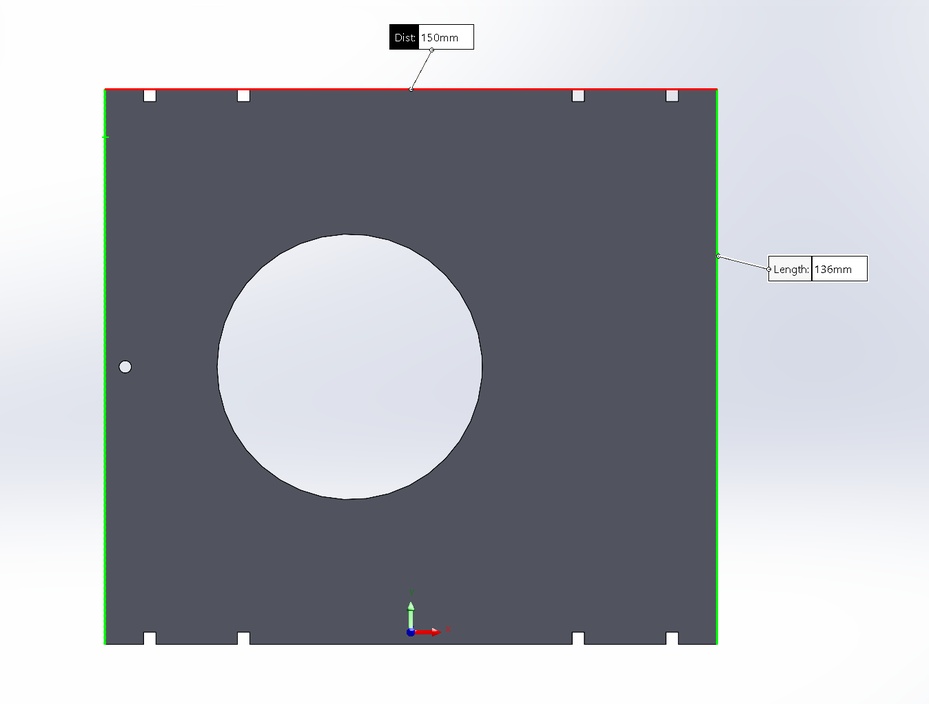
Modelagem da base inferior
Nessa etapa, utilizou-se como modelo uma peça feita pelo professor e o grupo modificou-a para adequar-se ao projeto proposto. A peça consiste em um paralelepípedo retângulo de 150mm por 136mm. Nela, observa-se um furo em forma de circunferência com diâmetro de 3mm alinhado com o centro da aresta de 136mm e a uma distância de 5mm (em relação ao centro da circunferência). Além disso, observa-se outra circunferência 65mm de diâmetro a uma distância de 55mm em relação à outra circunferência (considerando os centros de ambas circunferências). Finalmente, as arestas de 150mm apresentam 2 pares de furos quadrangulares de 3mm cada. Nesse sentido, considerando o furo mais próximo da aresta de 136mm, há uma distância de 9,5mm em relação à essa aresta e 20mm em relação ao outro furo, repetindo esse processo para todos os furos desse tipo. A peça possui uma espessura de 3mm.
-
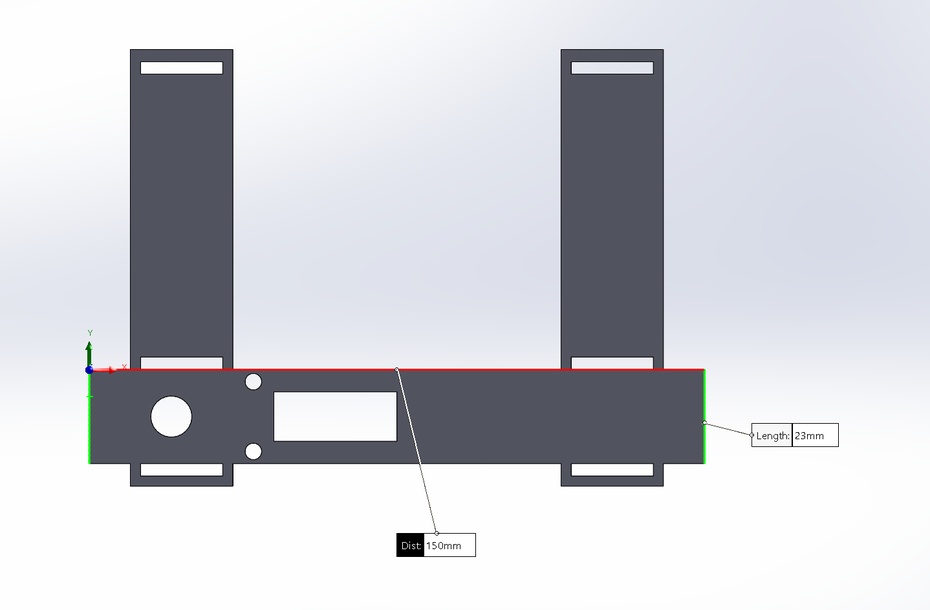
Modelagem das laterais
Nessa etapa, utilizou-se como modelo uma peça feita pelo professor e o grupo modificou-a para adequar-se ao projeto proposto. A peça consiste em um paralelepípedo retangular, medindo 150 mm por 23 mm e 3mm de espessura. Há um furo em forma de circunferência com 10 mm de diâmetro, localizando-se a 20mm de uma das arestas de 23mm e 11,5mm de distância em relação a aresta de 150mm (considerando o centro da circunferência). Ademais, compreende-se mais dois furos em formato de circunferência com 4mm de diâmetro, a uma distância de 40mm da mesma aresta de 23mm e 3mm de uma das arestas de 150mm, em relação ao centro das circunferências. Além disso, há um furo retangular medindo 30mm por 12mm, a uma distância de 45mm da mesma aresta de 23mm e 5,5mm em relação a cada aresta de 150mm.
Não apenas isso, na parte superior, há duas extensões dessa lateral, cada uma localizada a uma distância de 10mm em relação à aresta de 23mm, medindo 25mm de comprimento e 78mm de altura. Junto a tais extensões há 2 furos retangulares, a 2,5mm de distância em relação à cada aresta de 78mm da extensão, com 20mm de comprimento e 3mm de altura: o primeiro, localizado na parte mais baixa da extensão e o segundo localizado na parte mais alta, apresentando 3mm em relação ao topo da extensão. Finalmente, restam as outras 2 pequenas extensões para encaixe na parte inferior da peça, ambas com as mesmas medidas das extensões na parte superior.
-
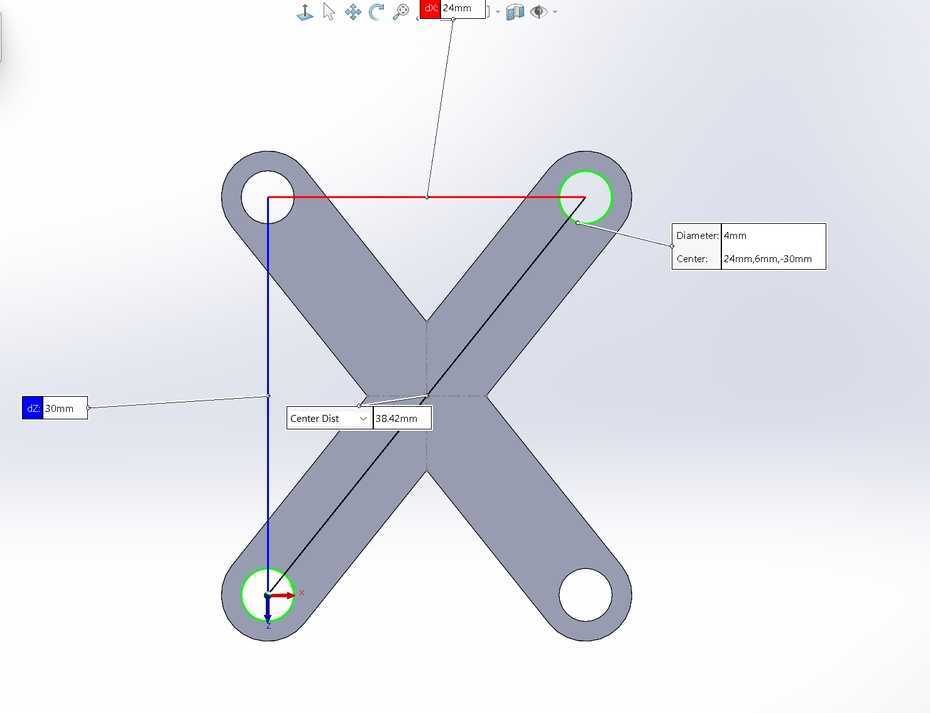
Modelagem dos Espaçadores
Nessa etapa, utilizou-se como modelo uma peça feita pelo professor e o grupo modificou-a para adequar-se ao projeto proposto. A peça consiste na sobreposição de 2 unidades da ferramenta "Straight Slot", medindo 38,42mm de comprimento, 7mm de largura e 3mm de espessura. Os furos em formato de circunferências, que medem 4mm de diâmetro e apresentam uma distância de 3,5mm considerando o centro em relação ao arco formado pela ferramenta "Straight Slot", entre 2 "Straight Slot" distintos apresentam uma distância horizontal de 24mm, considerando seus centros. Recomenda-se, primeiro, utilizar a ferramenta "Straight Slot", confirmar todas as medidas, usar a opção "extrude" e, depois, inserir as circunferências para os furos.
-
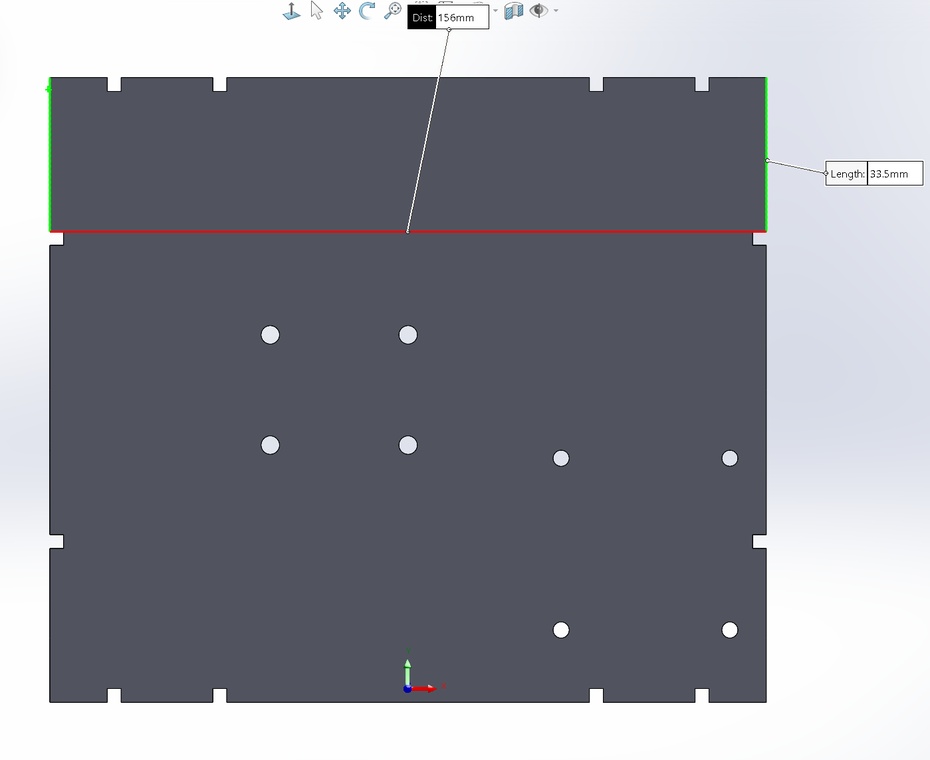
Modelagem da base intermediária
Nessa etapa, utilizou-se como modelo uma peça feita pelo professor e o grupo modificou-a para adequar-se ao projeto proposto. A peça consiste em um paralelepípedo retangular medindo 156mm por 136mm e uma espessura de 3mm. Nela, compreende-se 2 conjuntos de furos em formato de circunferência: o primeiro conjunto apresenta furos de 3.5mm de diâmetro, distando 37,38mm no eixo y e 36,74mm no eixo x um do outro, sendo que os furos mais próximos da aresta de 136mm estão localizados a 7,94mm dessa mesma aresta e, no caso do furo mais próximo da aresta de 156mm, 12,5mm da aresta de 156mm. Por outro lado, o segundo conjunto de furos, de 4mm de diâmetro, distam 24mm no eixo y e 30mm no eixo x. um dos outros, sendo que os furos mais próximos da aresta de 136mm estão localizados a 48mm de distância da mesma aresta e 56mm da aresta de 156mm superior.
-
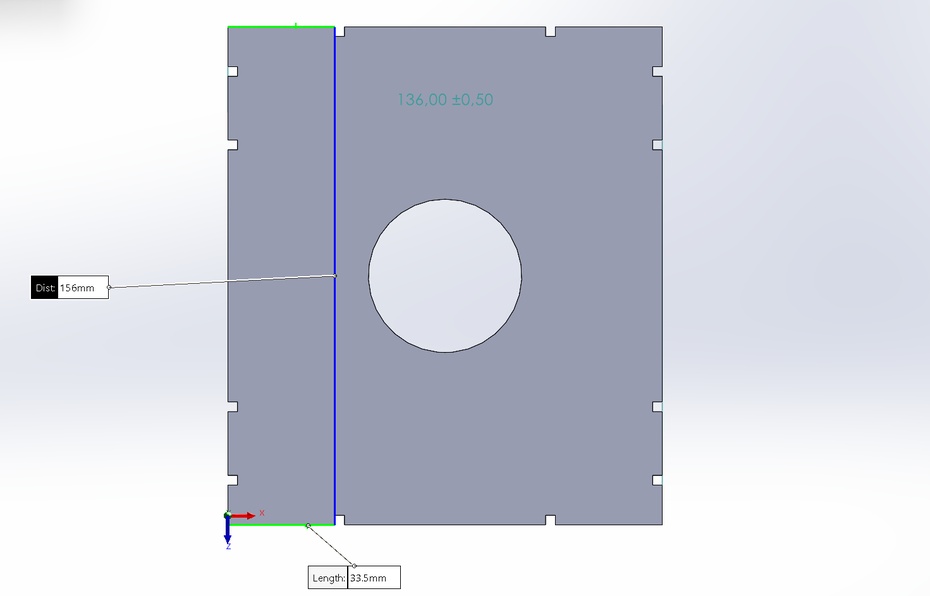
Modelagem da base superior
A peça consiste em um paralelepípedo retangular medindo 156mm por 136mm e uma espessura de 3mm. Nela, compreende-se um furo em formato de uma circunferência de 48 mm de diâmetro, distando 78mm da aresta de 136mm e 68mm da aresta de 156mm. Além disso, compreende-se furos quadrangulares nas arestas de 156mm e 136mm, medindo 3mm por lado. Em cada aresta de 156mm, compreende-se dois pares de furos quadrangulares, nos quais, um dos furos dista 12,5mm da aresta de 136mm e 20mm do outro furo, repetindo o processo para o outro par. Já em relação às arestas de 136mm, os furos distam 33,5mm da respectiva aresta de 156mm e 63mm entre si.
-
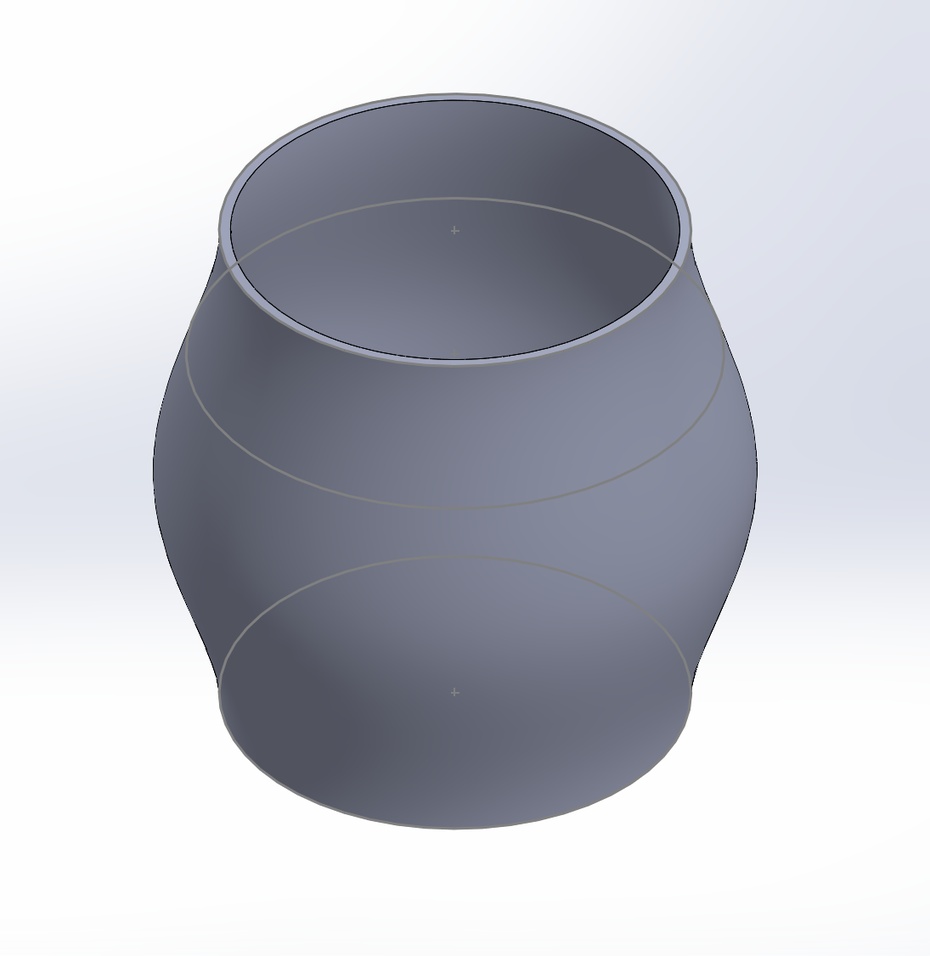
Modelagem do corpo do pinguim
Para construir o corpo do pinguim, foi estabelecido que a altura total do pinguim seria de 220mm. Portanto, considerou-se que o corpo teria 150mm e a cabeça 70mm. Dessa forma, para a construção do corpo, a altura foi dividida em 5 circunferências distribuídas igualmente para conferir um formato oval: a cintura e o pescoço possuem 125mm de diâmetro, a circunferência abaixo do pescoço e acima da cintura possuem 142,50mm de diâmetro e a barriga apresenta 160mm de diâmetro. Depois, foi utilizada a ferramenta "spline" para ligar as circunferências e a ferramenta "boundary-surface" para preenchê-las. Por último, utilizou-se a ferramenta "thicken" para conferir uma espessura de 3mm.
-
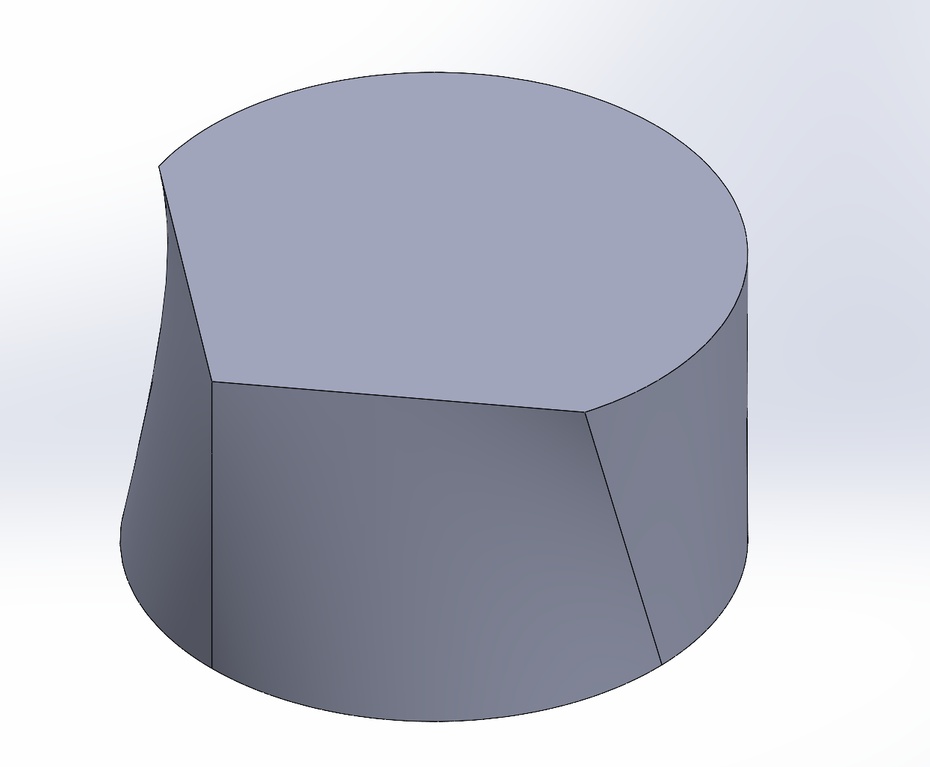
Modelagem da cabeça do pinguim
Para construir a cabeça do pinguim, foi estabelecido que ela possuiria uma altura de 70mm. Nesse sentido, foram feitas duas circunferências separadas por essa altura de 70mm. Depois, na circunferência de cima, recortou-se um arco da circunferência, gerando um segmento de reta de 120mm. Após isso, deve-se criar um triângulo isósceles com as seguintes medidas, 120mm, 75mm e 75mm. Assim, basta usar a ferramenta "loft" para conectar ambas circunferências e a ferramenta "shell" para esvaziar o conteúdo dentro da cabeça e criar uma espessura de 3mm.
2 Circuito e Montagem Eletrônica
-
Materiais para o circuito dos motores
Para a montagem dos motores, foi utilizado o modelo de circuito abaixo, utilizando como componentes os seguintes eletrônicos:
- 10 Fios Jumper
- 1 Ponte-H
- 1 Protoboard
- 1 Adaptador Robocore
- 1 Micro:bit
- 1 suporte para pilha (para Ponte-H)
- 1 suporte para pilha (para o Micro:bit) -
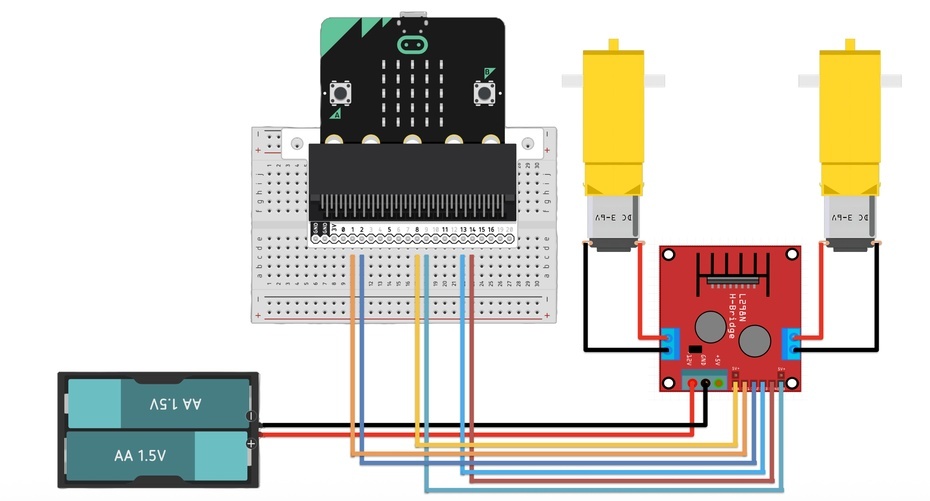
Montagem do circuito do motor
Para a montagem do circuito do motor, siga as especificações:
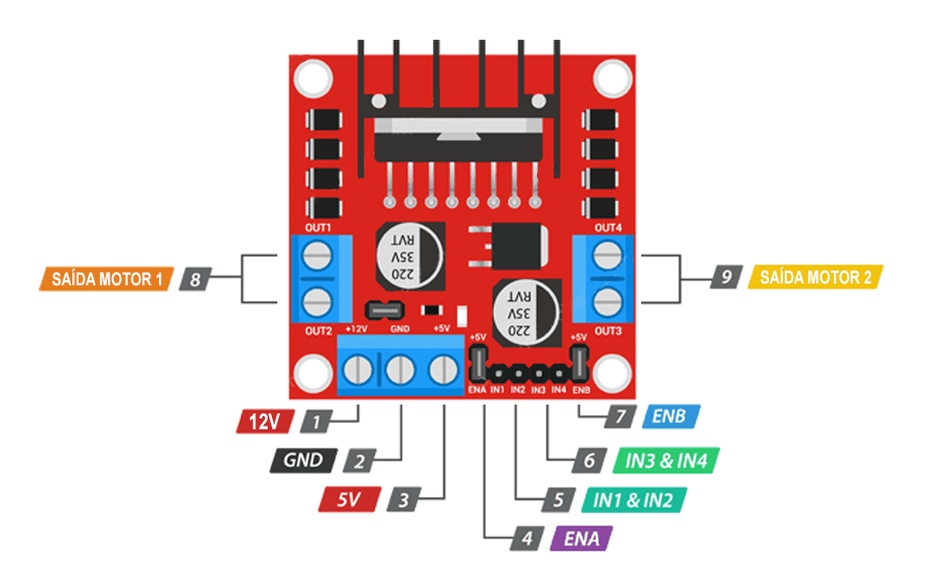
- Porta digital micro:bit (P1) é ligada ao IN1 da ponte-H (Controle do sentido do motor esquerdo)
- Porta digital micro:bit (P2) é ligada ao IN2 da ponte-H (Controle do sentido do motor esquerdo)
- Porta analógica micro:bit (P8) é ligada ao ENA da ponte-H (Controle da velocidade do motor esquerdo)
- Porta analógica micro:bit (P9) é ligada ao ENB da ponte-H (Controle da velocidade do motor direito)
- Porta digital micro:bit (13) é ligada ao IN3 da ponte-H (Controle do sentido do motor direito)
- Porta digital micro:bit (14) é ligada ao IN4 da ponte-H (Controle do sentido do motor direito)
Observação: confira sempre a pinagem do seu módulo de ponte H. Alguns módulos podem ter nomes ou posições diferentes para os pinos.
-
Imagem da ponte-H L298N e suas especificações
-
Materiais necessários para o circuito do sensor ultrassônico HC-SR04 com a adição do regulador de tensão linear LM7805:
- 7 fios jumper
- 1 ponte-H L298N
- 1 sensor ultrassônico HC-SR04
- 1 regulador de tensão linear LM7805
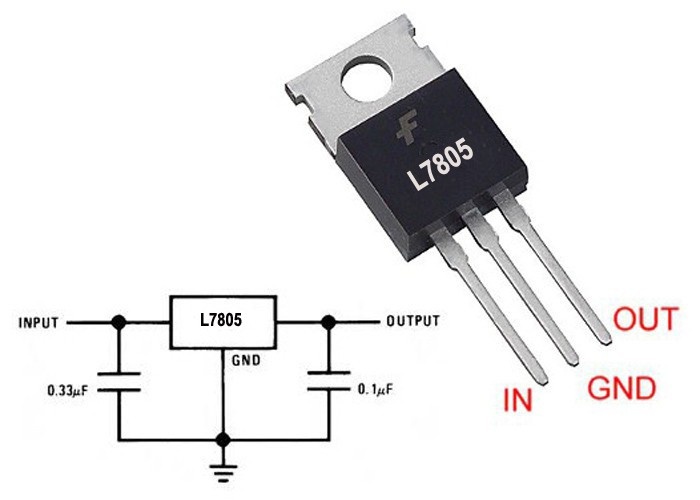
Observação: A imagem abaixo indica as entradas do regulador de tensão linear LM7805.
-
Imagem do sensor ultrassônico HC-SR04

-
Montagem do circuito do sensor ultrassônico HC-SR04 com a adição do regulador de tensão linear LM7805
Para a montagem do circuito do sensor ultrassônico, observe que o micro:bit possui 2 portas GND. Uma delas, será utilizada para o sensor ultrassônico, enquanto a outra será ligada ao regulador de tensão linear. Dito isso, siga as seguintes especificações:
REGULADOR DE TENSÃO
- Caso esteja usando um protoboard, coloque o regulador de tensão linear de uma forma que haja ao menos uma entrada a frente e uma entrada atrás de cada pino do regulador, sendo identificados como "entrada da frente" e "entrada de trás" do respectivo pino, a partir dessa instrução;
- Pino GND do regulador de tensão linear (pela entrada da frente) é ligado à porta GND micro:bit;
- Pino GND do regulador de tensão linear (entrada de trás) é ligado à entrada GND da ponte-H. Haverá 2 fios ligados a essa porta: um fio do suporte de pilha (identificado como fio preto na imagem abaixo) e um fio jumper do regulador de tensão (identificado como fio roxo na imagem abaixo);
- Pino IN do regulador de tensão é ligado a entrada 5V da ponte-H (identificado como um fio cinza na imagem abaixo);
- Pino OUT do regulador de tensão é ligado ao pino VCC do sensor ultrassônico.
SENSOR ULTRASSÔNICO
- Pino VCC do sensor ultrassônico é ligado ao pino OUT do regulador de tensão;
- Pino GND do sensor ultrassônico é ligado à porta GND do micro:bit;
- Pino TRIG do sensor ultrassônico é ligado à porta 15 do micro:bit;
- Pino ECHO do sensor ultrassônico é ligado à porta 16 do micro:bit.
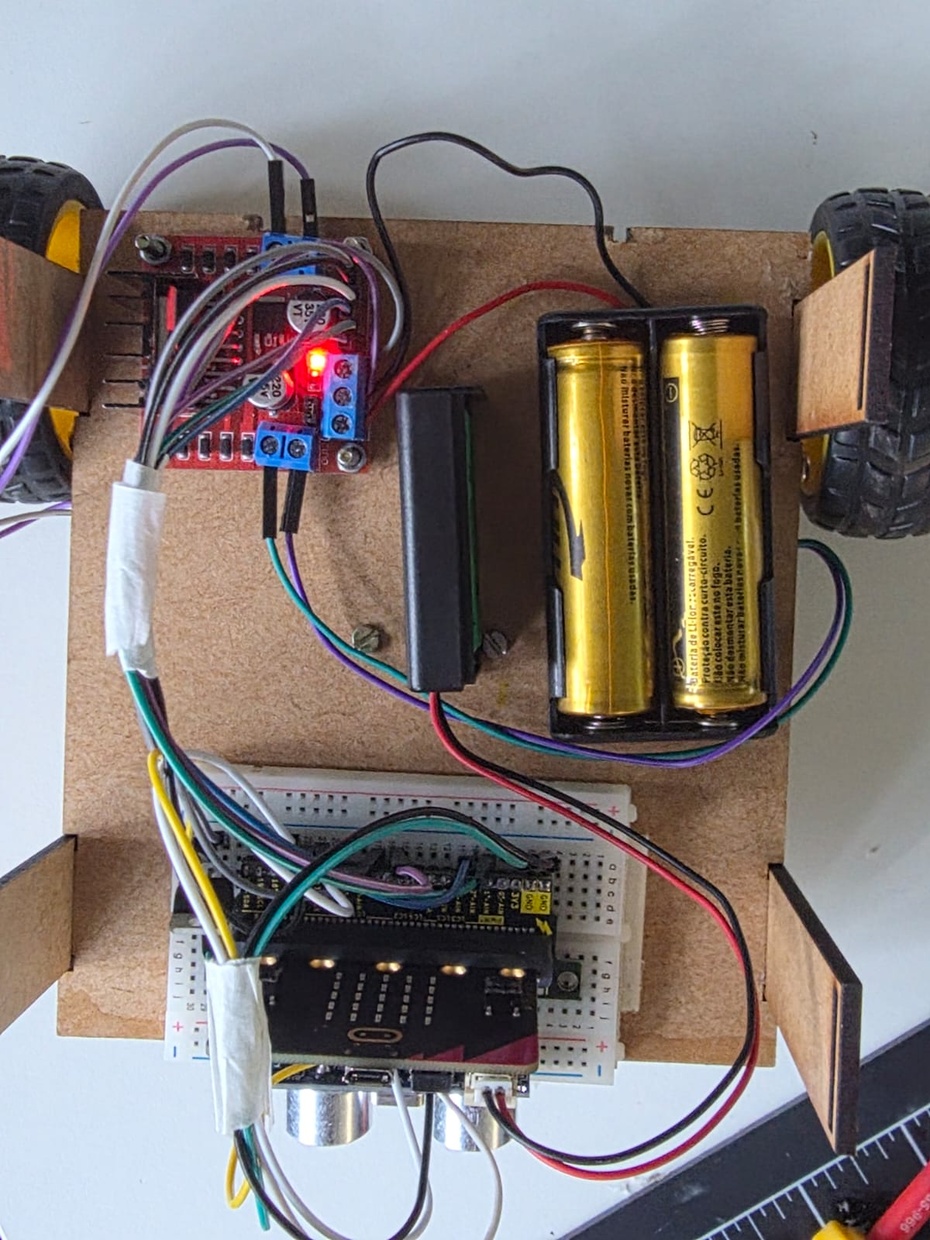
Observação: A imagem abaixo mostra dois fios ligados à entrada GND da ponte-H L298N, sendo o fio preto proveniente do suporte de pilhas e o fio roxo proveniente do pino GND do regulador de tensão linear.

-
Adição das pilhas ao circuito
Antes de incorporar as pilhas ao circuito, é importante destacar que, ao conectar o circuito ao computador para inserir a programação no micro:bit, deve-se, antes, desconectar as pilhas de seus suportes. Além disso, lembre-se, sempre, de colocar a parte lisa da pilha junto da mola e, nunca, a parte não lisa, evitando um curto-circuito e a queima de componentes eletrônicos. Nesse sentido, para adição das pilhas ao circuito, deve-se seguir os próximos passos:
- Conectar um dos fios (no caso da imagem acima, o fio preto) do suporte de pilhas da ponte-H na entrada GND da ponte-H;
- Conectar um dos fios (no caso da imagem acima, o fio vermelho) do suporte de pilhas da ponte-H na entrada 12V da ponte-H;
- Conectar o conjunto de fios vermelho e preto do suporte pilhas na entrada localizada na parte superior do micro:bit.
Programação
-
Guia da programação
A programação foi realizada no site makecode.microbit.org e dividida em 2 arquivos: um para o micro:bit integrado ao robô e o outro para o controle do robô. -
Programação do micro:bit integrado ao robô
O micro:bit instalado no robô deve receber comandos por rádio e transformar tais comandos em movimento.
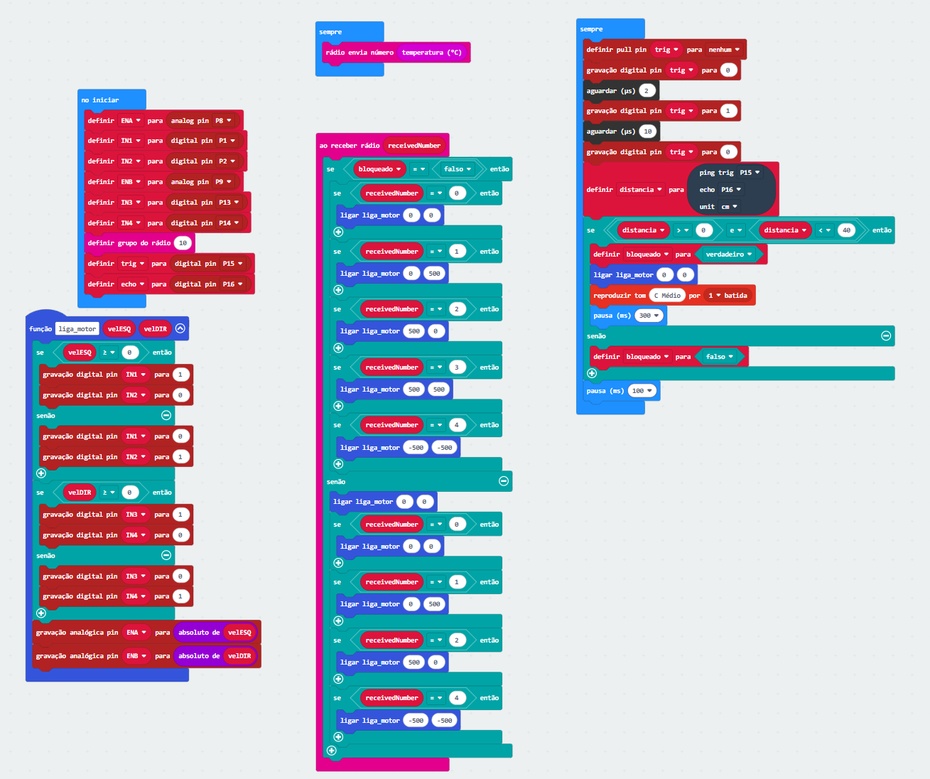
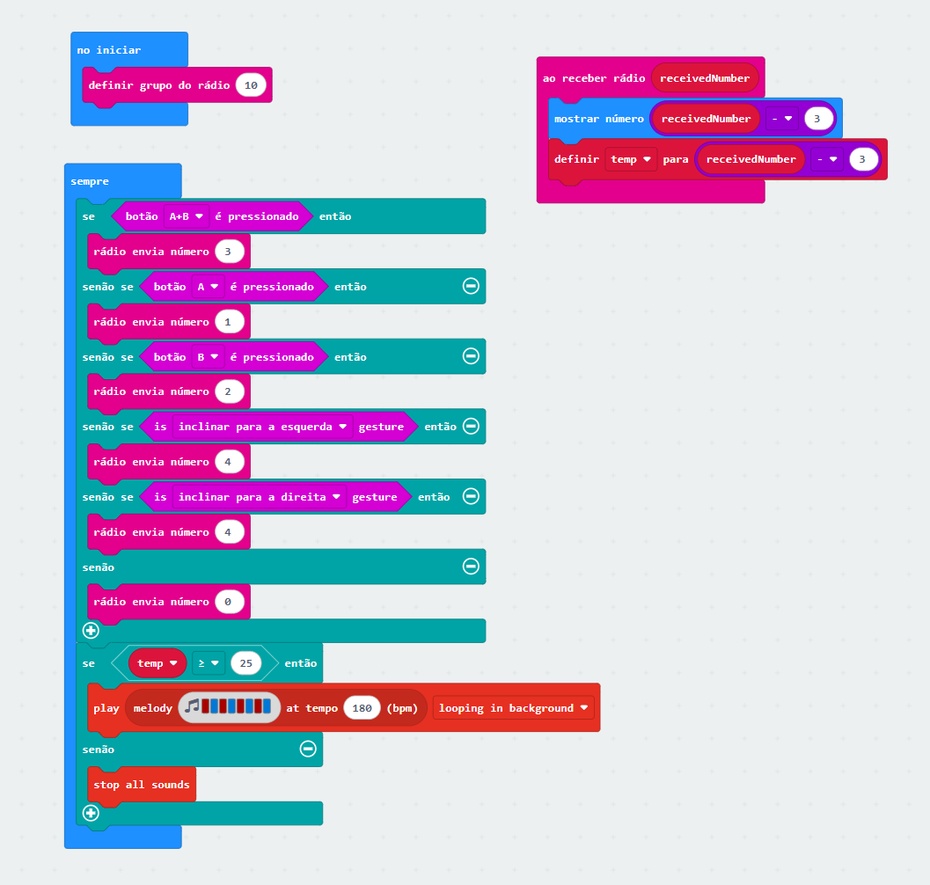
No programa, primeiro se configura os pinos usados para controlar a ponte H, define o grupo do rádio como 10 e executa uma função para ligar os motores conforme o número recebido. A seguir é apresentado a lógica do programa do robô, incluindo os comandos recebidos por rádio e a função de acionamento dos motores.
Uma lógica para controle do robô pode ser:
- Ao receber 0: parar
- Ao receber 1: acionar motor direito (virar para esquerda)
- Ao receber 2: acionar motor esquerdo (virar para direita)
- Ao receber 3: andar para frente
- Ao receber 4: andar para trás (ré)
Ademais, foi inserida uma lógica para utilizar o sensor ultrassônico HC-SR04 como um sistema contra colisões. Para isso, em primeiro lugar, configurou-se os pinos TRIG e ECHO do sensor ultrassônico para enviar pulsos ultrassônicos. Em segundo lugar, definiu-se uma variável chamada de distância a partir da definição das portas dos pinos TRIG e ECHO, respectivamente, como portas 15 e 16 e a unidade de medida estabelecida como centímetros. Depois, adicionou-se a seguinte condição: se a distância encontrada em um obstáculo e o sensor for maior que 0 e menor que 40 centímetros, deve-se desligar os motores, reproduzir um som específico e esperar por 0,3 segundos para ligar os motores novamente. Assim, ao detectar uma possível colisão, o robô desliga seus motores imediatamente.
Além disso, foi inserida outra lógica para captar a temperatura ambiente por meio do sensor de temperatura do próprio micro:bit e enviá-la ao micro:bit de controle do robô, através de um número na forma da própria temperatura captada.
-
Programação do micro:bit de controle do robô
O segundo micro:bit funciona como controle.
No programa do controle também é usado o grupo de rádio 1 e é enviados números diferentes quando os botões são pressionados.
Os comandos utilizados foram:
- Botão A: Envia 1, gira para a esquerda;
- Botão A: Envia 2, gira para a direita;
- Botão A+B: Envia 3, avança para frente;
- Nenhum Botão pressionado: Envia 0, robô parado;
- Inclinar para a esquerda ou para a direita: ré
Além disso, foi inserida uma lógica para receber a temperatura captada pelo primeiro micro:bit e mostrá-la nos leds do segundo micro:bit. Não apenas isso, mas, se a temperatura captada for igual ou superior a 25°C, o segundo micro:bit deve tocar uma música e parar quando a temperatura for inferior a 25°C.
Pintura e características únicas
-
Materiais e Ferramentas
Para realizar a pintura e a adição de nadadeiras e bico, foram utilizados os seguintes materiais:
- 1 tinta spray primer cinza
- 1 tinta spray branca (é recomendado usar tinta spray primer branca)
- 1 tinta acrílica preta
- 1 massa biscuit laranja
- 1 EVA preto do tamanho de uma folha A4
- 1 par de luvas
- 1 máscara
- 1 cabeça de pinguim impressa em PLA
- 1 corpo de pinguim impresso em PLA
Além disso, foram utilizadas as seguintes ferramentas:
- Pincéis (Grande e Pequeno)
- Tesoura
- Papel para sujar
- Cola super bonder
- 1 lixa para plástico -
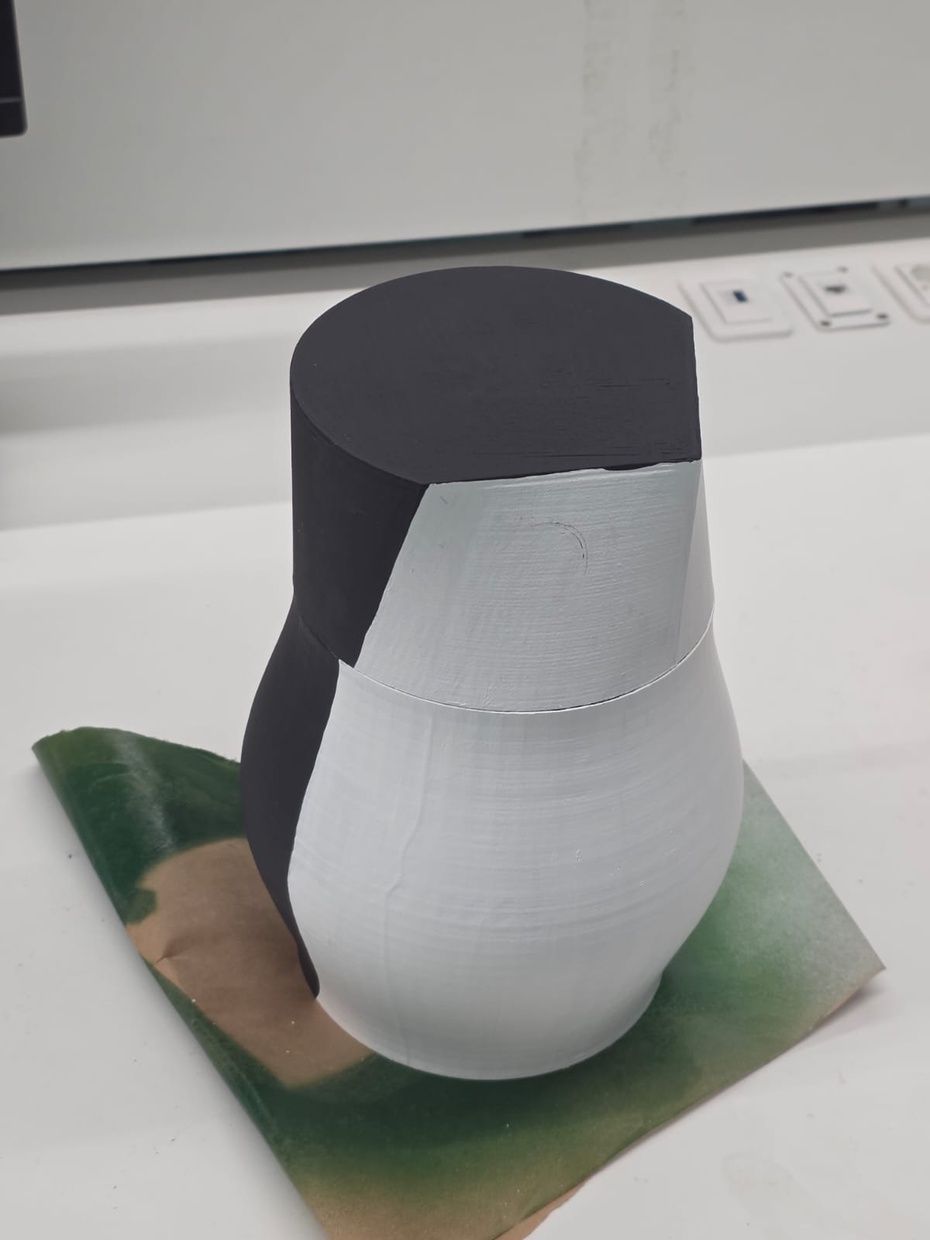
Pintura
Antes de pintar, veja o rótulo das embalagens das tintas spray e acrílica, conferindo o tempo de cura (secagem) e respeitando-o após passar cada camada de tinta para não comprometer a peça e o resultado da pintura. Para realizar a pintura, compreende-se o uso de um ambiente adequado, uma vez que existe a possibilidade de sujar o ambiente com o uso de tinta spray, além de máscaras e luvas para evitar futuros problemas de saúde.
Nesse sentido, primeiro, deve-se lixar a cabeça e o corpo de PLA do pinguim. Em seguida, deve-se utilizar a tinta spray primer cinza para promover ainda mais absorção de tinta, posto que a superfície do PLA não é adequada para aplicação de tintas imediatamente, compreendendo duas camadas de primer. Em terceiro lugar, deve-se usar a tinta spray branca em todo o pinguim. Finalmente, use a tinta acrílica preta com os pincéis buscando aproximar-se da imagem dos personagens "Os Pinguins de Madagascar", isto é, no topo, atrás e em parte das laterais da cabeça, e atrás e nas laterais do corpo do pinguim.
-
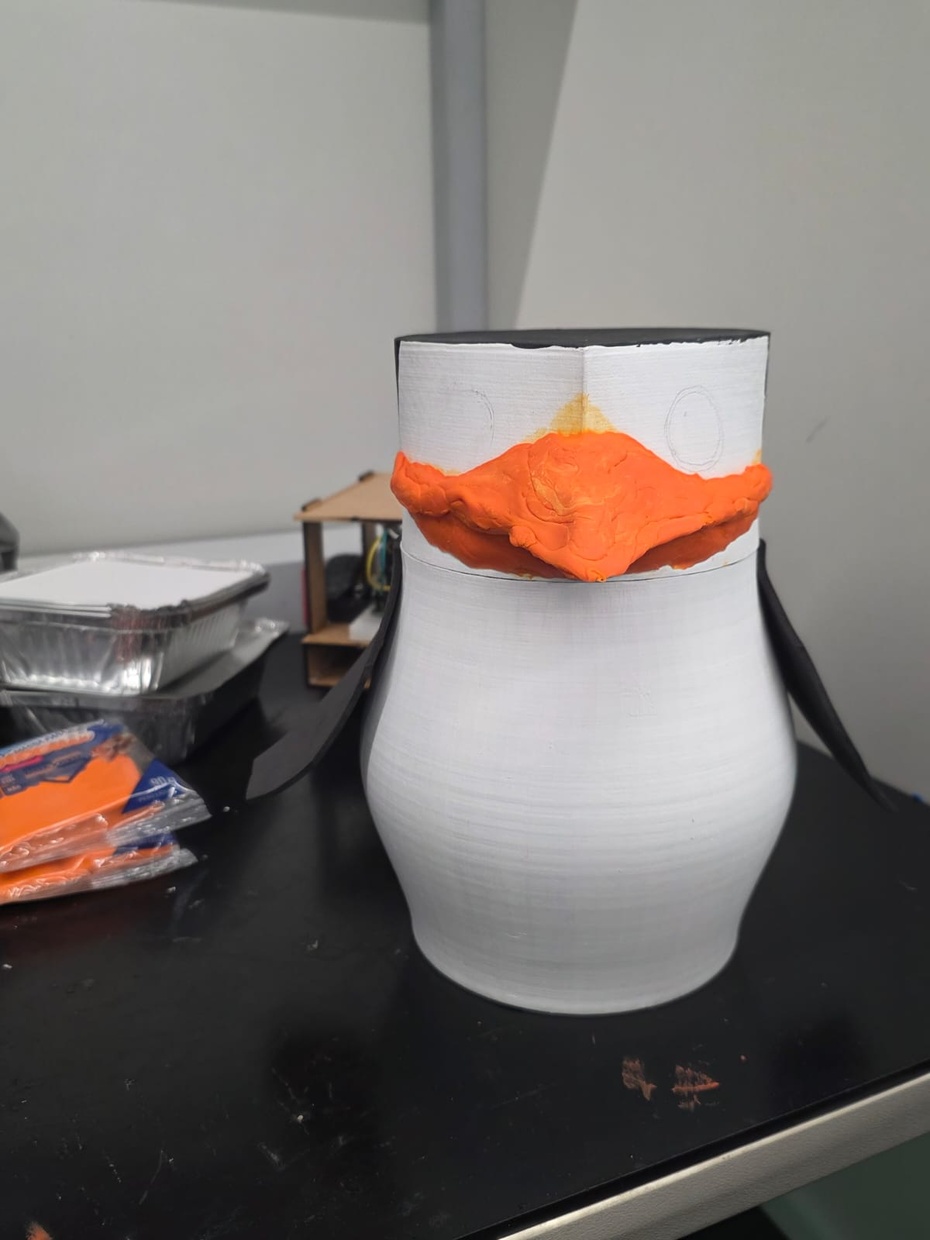
Características únicas
Para inserir as nadadeiras do pinguim, deve-se recortar o EVA preto em forma de octógonos irregulares. Depois, basta colar uma das pontas de cada octógonos em cada lateral do corpo do pinguim. Por outro lado, para criar o bico do pinguim, foi necessário manusear uma massa biscuit laranja. Para efetuar essa tarefa, é necessário, primeiro, "sovar" a massa, ou seja, amassá-la para torná-la macia. Em segundo lugar, insira a massa na cabeça do pinguim, alisando-a e buscando construir uma base antes de construir o bico de fato. Em seguida, com uma base previamente feita, procure concentrar-se nos detalhes característicos de um bico, como a ponta e seu comprimento ao longo da cabeça.
Montagem
-
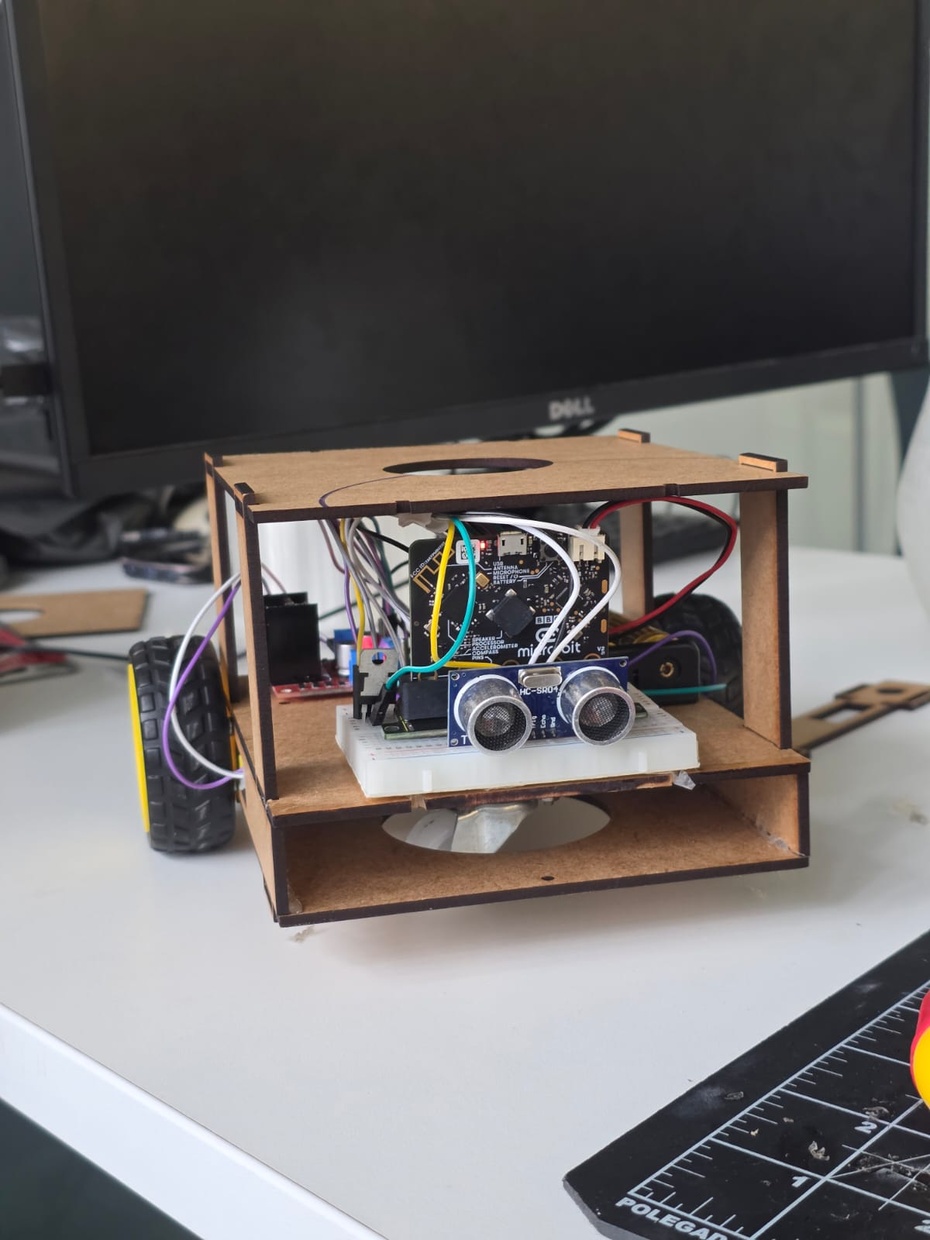
Base, motores e circuito
Para a montagem da base, é importante, em primeiro lugar, encaixar as laterais na base inferior e parafusar os motores. Em seguida, parafuse o rodízio, junto de 4 espaçadores na base intermediária, parafuse a ponte-H, virando a parte que contém as entradas da ponte-H no sentido da lateral oposta e encaixe a base intermediária, conforme os encaixes das laterais. Note que será possível parafusar, apenas, 3 dos 4 parafusos, devido a um conflito do parafuso com o motor. Depois, monte o circuito em cima da base intermediária. A seguir, certifique-se de que nenhum fio está sendo forçado e encaixe a base superior de acordo com as laterais. Finalmente, reforce todas as laterais com cola super bonder, para evitar rompimentos de peças.
-
Conjunto cabeça e corpo do pinguim
Para a inserção do conjunto cabeça e corpo do pinguim, é necessário, primeiro, colar a cabeça no corpo do pinguim com o uso de cola super bonder. Nesse sentido, tome cuidado para que a cola não seja derramada na pintura, uma vez que isso pode danificar a pintura. Depois, basta colar o pinguim na base superior, seguindo o centro de massa do robô.
Testes e Melhorias
-
Testes do projeto
Antes de prender tudo no chassi, teste o circuito em etapas.
Primeiro, verifique se os dois micro:bits estão no mesmo grupo de rádio. Depois, teste se o micro:bit do robô está recebendo os números enviados pelo controle. Em seguida, conecte apenas um motor e veja se ele gira. Depois, teste o segundo motor. Só então fixe os componentes no carrinho.
Durante os testes, observe:
- os motores estão girando?
- os motores giram no sentido esperado?
- o robô anda reto?
- o comando de parar funciona?
- a alimentação dos motores está adequada?
- os fios estão bem conectados?
- a ponte H aquece demais?
- a temperatura mostrada é a mesma estipulada por outras fontes de informações?
- o sensor ultrassônico funciona como esperado? Ou ele não está detectando o obstáculo a frente?
- o centro de massa do robô está correto? É necessário ajustar o centro de massa colocando o rodízio mais para frente ou mais para trás?
- é possível conectar o fio de atualização da programação no micro:bit integrado ao robô, mesmo após inserir a base superior?
Se o robô girar para o lado errado, talvez seja necessário inverter os fios de um motor ou ajustar a lógica dos pinos IN1, IN2, IN3 e IN4. Ademais, no caso do sensor ultrassônico não detectar obstáculos e o problema for resolvido por meio da alteração da programação, procure mudar as portas do micro:bit conectadas ao sensor ultrassônico. -
Problemas comuns e como resolver
- Problema: O motor não gira. Possível causa: falta de alimentação externa. Solução: verifique as pilhas, a bateria e se o GND está comum entre os circuitos.
- Problema: Só um motor funciona. Possível causa: erro de ligação ou motor com problema. Solução: teste o motor e os fios separadamente.
- Problema: O robô gira em vez de andar reto. Possível causa: motores girando em sentidos opostos. Solução: inverta os fios de um dos motores ou ajuste o programa.
- Problema: O robô não responde ao controle. Possível causa: grupo de rádio diferente nos dois micro:bits. Solução: confira se os dois micro:bits estão usando o mesmo grupo de rádio.
- Problema: O movimento está fraco. Possível causa: pilhas descarregadas ou alimentação inadequada. Solução: troque as pilhas ou utilize uma fonte de alimentação adequada para os motores.
- Problema: O micro:bit reinicia durante o funcionamento. Possível causa: o motor está puxando muita corrente. Solução: separe a alimentação do micro:bit da alimentação dos motores e confira se o GND está comum.
- Problema: O robô cai para frente após mover-se. Possível causa: o centro de massa do robô está o jogando para frente. Solução: coloque o pinguim mais para trás na base superior e fixe o rodízio inteiramente para frente por meio de cola ou fita adesiva.
- Problema: Não é possível conectar o fio de atualização da programação no micro:bit integrado ao robô, após inserir a base superior. Solução: retire o micro:bit do adaptador Robocore e conecte o cabo de atualização enquanto ele está fora do robô, reconectando-o ao adaptador após o fim da atualização. -
Melhorias possíveis
Para a versão básica:
- colocar o rodízio mais para frente (troque a posição dos furos de parafuso da base intermediária e da grande circunferência da base inferior no CAD para mais perto da lateral de 136mm) para conferir maior estabilidade ao robô;
- aumentar a altura da base superior para facilitar a conexão do fio de atualização da programação no micro:bit integrado ao robô
Depois que a versão básica estiver funcionando, você pode evoluir o projeto.
Algumas ideias:
- controlar a velocidade dos motores;
- criar um chassi personalizado;
- criar uma garra ou mecanismo simples;
- adicionar um sensor de umidade para melhor precisão de dados meteorológicos;
-adicionar um sensor infravermelho para contagem de espécies.
Conclusão
Este robô controlado por micro:bit pode ser utilizado para o controle da temperatura ambiente, contribuindo para a preservação do meio ambiente, não só de pinguins como de outros animais e da flora, através da combinação de montagem física, eletrônica básica, programação em blocos e comunicação sem fio.
Mesmo sendo simples, ele apresenta ideias muito importantes: o micro:bit envia comandos, a ponte H controla os motores com o auxílio do sensor ultrassônico, o sensor de temperatura capta a temperatura, transmitindo-a para o segundo micro:bit, e o chassi transforma tudo isso em movimento. A partir dessa base, é possível criar robôs ainda mais completos, com mais sensores, autonomia e diversificação das aplicações reais.
Comentários
1Sorriam e acenem, rapazes. Sorriam e acenem! 🐧 😂