

Projeto Kabuto - Caranguejo Ferradura
Publicado em 3 de Junho de 2026 às 00:24
O Kabuto é um robô controlado remotamente, inspirado no formato de um caranguejo-ferradura e programado com a plataforma Microbit, desenvolvido para monitorar temperatura e umidade em regiões costeiras. Seu principal diferencial é a capacidade de realizar análises diretamente no ambiente estudado, garantindo dados mais precisos e eficientes. Além disso, por possuir aparência semelhante à fauna local — especialmente de um animal pouco predado — o robô consegue se integrar ao ecossistema sem causar perturbações significativas à vida animal. Dessa forma, ele representa uma solução tecnológica sustentável para o monitoramento ambiental de áreas costeiras.
Materiais Necessários
- 02 Motores DC 3-6V com redução e pneu com rodas ( motor amarelo )
- 01 Rodinha Boba ( Suporte Traseiro )
- 04 Pilhas AA 1,5 ( Duracell )
- 01 Sensor Ultrassônico HC-SR04
- 01 Sensor de Temperatura e Umidade DHT11
- 02 Micro:bit Programado e Micro:bit Controlado
- 01 Display LCD 16x2 1602 Backlight Azul com modulo l2c Arduino
- 01 Driver - Driver Expansion Board for micro:bit / UNIHIKER M10 / K10
- Cabos Jumpers, Macho/Macho
- Parafusos
- Material reciclável : dobrável/moldável - para montar a carcaça
Ferramentas Necessárias
- Chave tipo Philips ou fenda
- Impressora 3D _ Inventor ( Desenho do chassi )
- Alicate
- Soldador
- Cabo USB
- Site Make Code ( Programação )
Etapas
Construção Mecânica
-
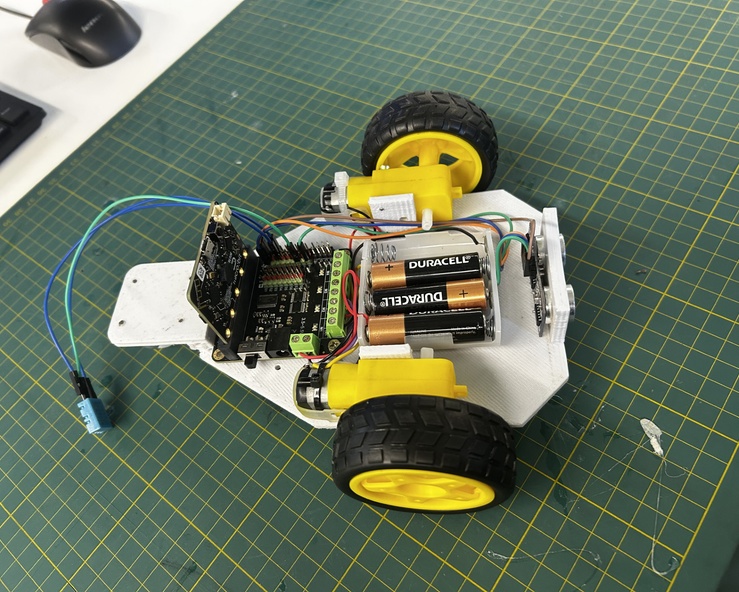
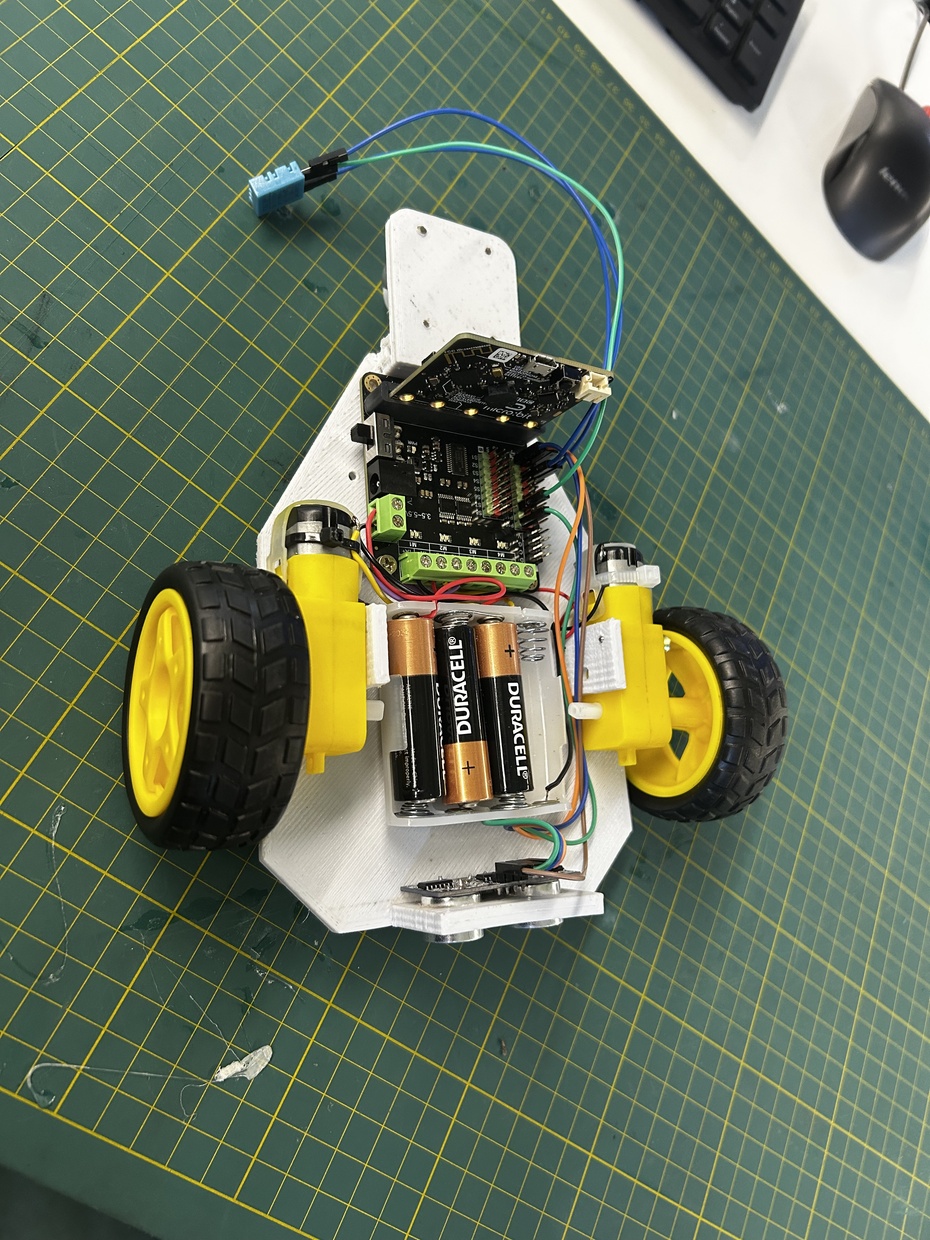
A construção mecânica do robô foi realizada a partir de um chassi desenvolvido em material leve ( Impresso em 3D ), com o objetivo de garantir resistência estrutural e baixo peso. O sistema de locomoção adotado consiste em duas rodas laterais acopladas a motores DC, permitindo a movimentação do robô.
Os componentes eletrônicos foram organizados de forma estratégica sobre o chassi, para facilitar o acesso e a conexão dos módulos. A alimentação do sistema é feita por um suporte de pilhas, fixado na região central, contribuindo para a estabilidade ao manter o centro de massa equilibrado.
O sensor DHT11 foi instalado na parte traseira do robô ( região da calda ) para que ficasse em posição elevada e externa à estrutura principal, garantindo maior exposição ao ambiente, e dados mais precisos. A fixação dos componentes foi realizada por meio de suportes e parafusos, assegurando firmeza durante a operação.
Observação: Apesar do desempenho estrutural, percebe-se a necessidade de atentar-se para a organização dos cabos, a fim de evitar interferências mecânicas durante o funcionamento do robô.
Processo de montagem e estrutura.
-
A estrutura do robô foi desenvolvida de forma personalizada, dependendo somente de uma única base de sustentação dos componentes , a partir de um modelo projetado em software de desenho técnico (AutoCAD). A utilização do AutoCAD contribuiu significativamente para a redução de erros de montagem e retrabalho, aumentando a precisão do projeto mecânico. Após a etapa de modelagem, as peças foram fabricadas por meio de impressão 3D usando plástico.
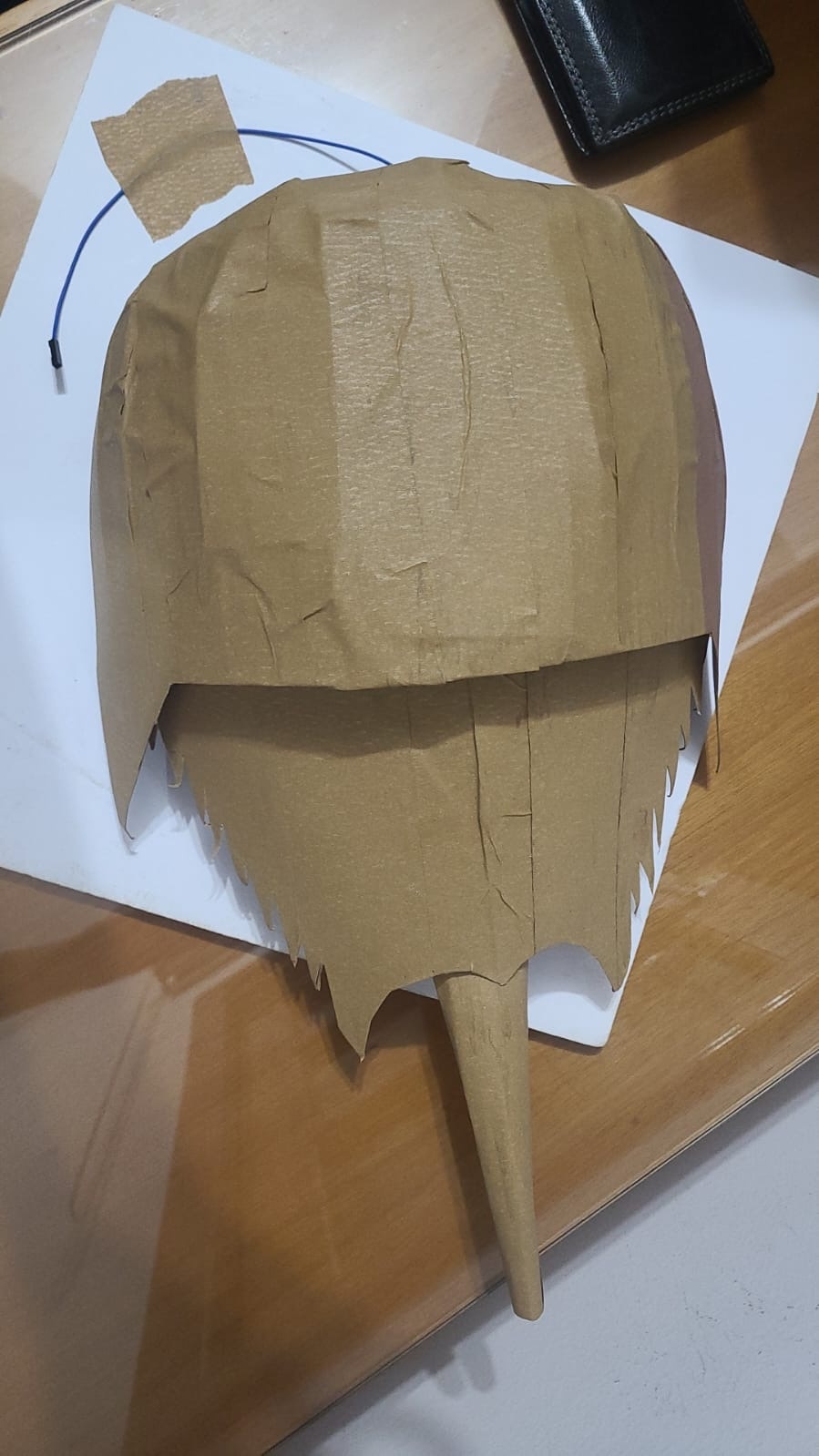
A carcaça foi confeccionada manualmente a partir de papel papelão, escolhidas por serem um material leve, e de fácil modelagem. Inicialmente, as partes foram medidas, recortadas e moldadas de acordo com o formato do caranguejo ferradura, buscando reproduzir a estrutura externa. Em seguida, as partes foram unidas e fixadas com fita adesiva, o que permitiu maior estabilidade e ajudou a manter o formato durante a montagem.
Para finalizar, foram feitos ajustes nas bordas e no encaixe das peças, de modo a melhorar o acabamento e garantir que a carcaça ficasse firme . O resultado foi uma estrutura externa simples, '' resistente'' e adequada para proteger os componentes internos.
-
A estrutura do controle foi desenvolvida de forma estética , não sendo necessária seguir esse padrão.
Portanto, acoplamos ao sistema um botão analógico para facilitar os comandos.

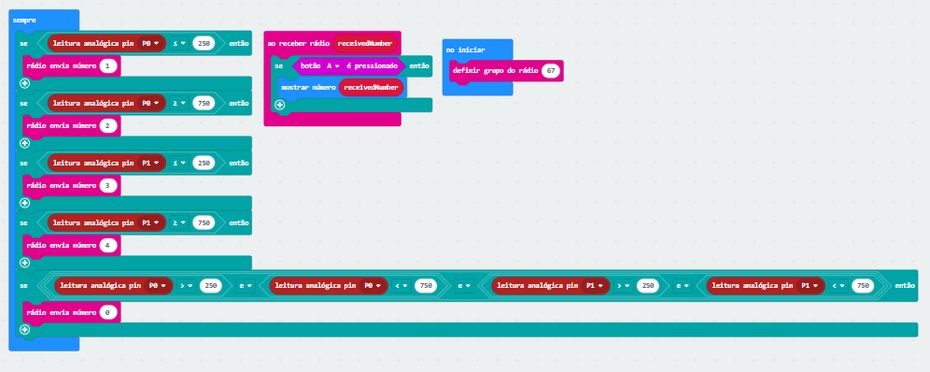
Sistema de Controle (Programação - Site Make Code )
-
Código para motores e sensor.
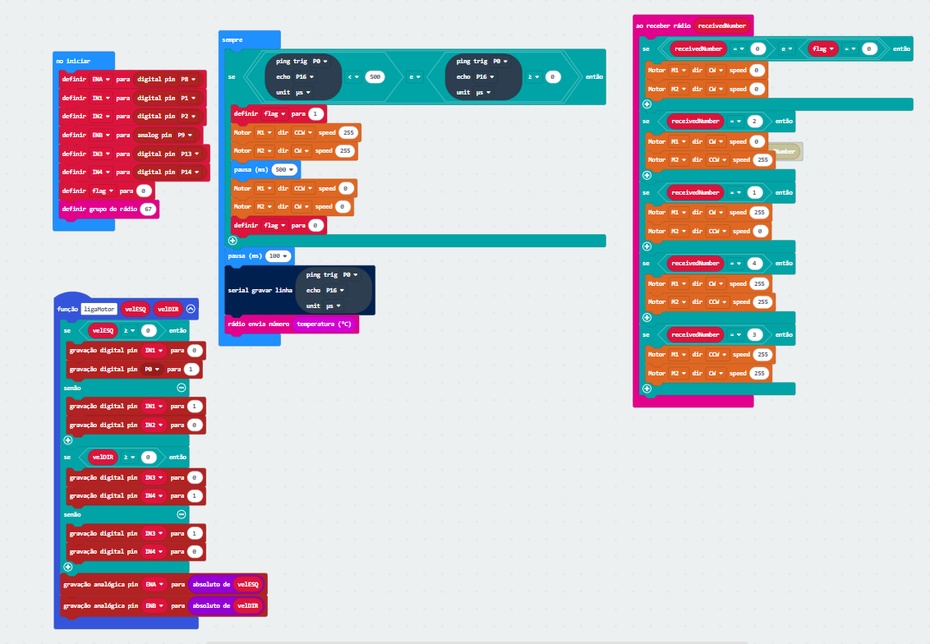
-
Continuação Códigos :
Integração Elétrica e de componentes
-
Ligação dos motores na placa:
Conecte os fios de um dos motores aos pinos OUT1 e OUT2 e do outro aos pinos OUT3 e OUT4.
Ligação do porta pilhas:
Conecte os fios ao Driver
Atenção, lembre-se de atentar para a organização dos fios. -
Ligação do Sensor Ultrassônico:
-VCC do sensor ao 5V do driver
-GND do sensor ao GND do driver
-Trigger do sensor a um pino digital do driver
-Echo do sensor a outro pino digital do driver
Ligação do Sensor Dht11:
-GND ao Conecte este pino na porta digital
-VCC ao Conecte este pino no +5V do Driver Expansion Board for micro:bit .
-Dados ao Conecte este pino na porta digital
Atenção, as portas e pinos digitais ficam a escolha !!
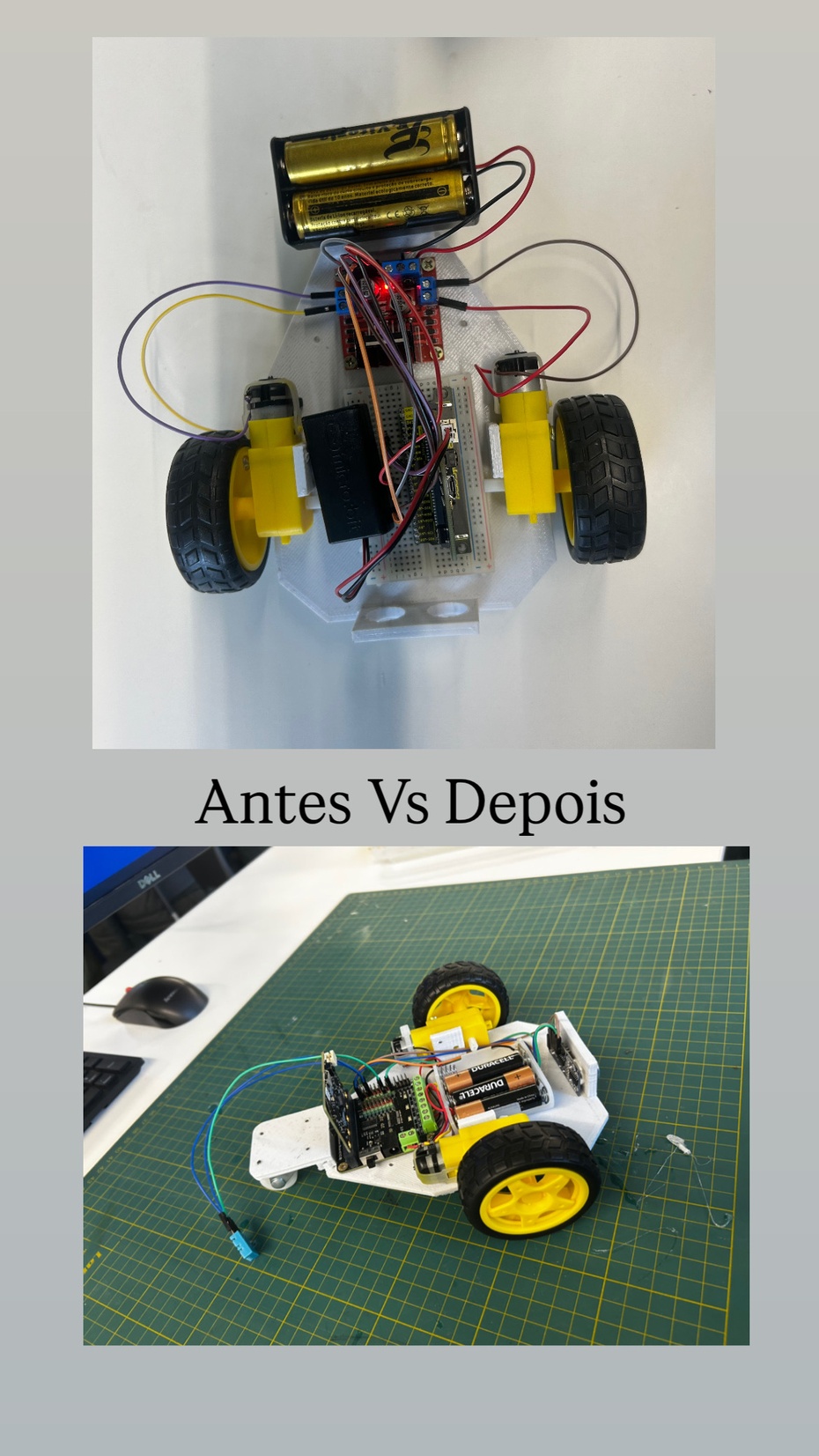
Teste para Melhorias
-
Devido aos problemas de voltagem para sustentar os sensores e placa, foram necessárias realizar modificações no sistema de alimentação, por isso mudamos para o Driver Expansion Board for micro:bit.
Observação: Caso queria utilizar a Ponte H, Protoboard e o Adaptador de Micro:bit para a Protoboard, Atente-se para a distribuição de energia, observe se os sensores estão funcionando corretamente e se as ligações estão corretas !!.
Verificação das Melhorias
-
Melhor organização dos componentes, e ligações;
Maior eficiência na distribuição da energia para alimentação dos motores, sensores e placa.
Conclusão
O desenvolvimento deste projeto permitiu a aplicação prática de conceitos teóricos, integrando conhecimentos de planejamento, construção mecânica e organização de tarefas em equipe, mesmo diante de limitações, foi possível obter um resultado funcional e coerente com os objetivos propostos. Dessa forma, conclui-se que um projeto simples pode contribuir com o desenvolvimento da criatividade, inovação e para nós, estudantes de engenharia do Instituto Mauá de Tecnologia, obtemos conhecimentos e competências essenciais para o mercado de trabalho e futuros projetos.
Vale ressaltar que este trabalho foi realizado por meio da equipe, sendo Radja Mani, Luiz Felipe llovatte Beteta, Eduardo Miranda Ramos e Enzo Kenichi Tanaka Ramos, os integrantes.
Comentários
0