

RatoBot - Projeto de Engenharia de Sustentabilidade
Publicado em 27 de Maio de 2026 às 15:43
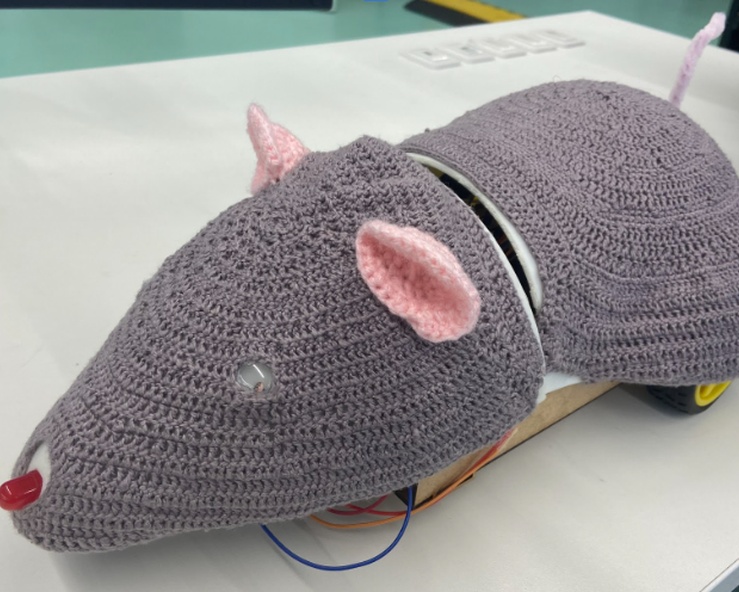
Um robô de monitoramento de gases poluentes (CO) em forma de rato para áreas urbanas, montado para a disciplina de Engenharia de Sustentabilidade. Ele é controlado por um controle remoto (microbit) e sua movimentação se dá por 3 rodas, sendo 2 delas giradas por motores, e pelagem e orelhas feitas de crochê.
Feito por:
Henrique Coutinho Vilela Sampaio
Leonardo Libano
Rafaela Coelho Castelli
Rayone Marcus Silva da Sousa
Materiais Necessários
- 2 microbits (um para programar os motores e um para o controle do robô);
- Cabo USB (conecta o microbit a um computador para transportar o código);
- Bateria do microbit;
- Sensor de CO (MQ7);
- Placas de MDF (base de sustentação do sistema)
- 2 sensores de luminosidades (LDR);
- 1 led vermelho;
- 2 mini motores DC 3-6V;
- 1 protoboard;
- 2 pilhas HU (x2 4.2V);
- 1 fonte;
- 1 resistor (1k ohm);
- 2 rodas de borracha;
- 1 roda giratória 360° pequena;
- 10 parafusos (x8 3x22 mm; x2 3x12 mm);
- 1 linha de crochet cinza fina;
- 1 linha de crochet rosa clara grossa;
- 1 limpador de cachimbo rosa claro (rabo);
- 2 plásticos de olhos de fantoche para proteção dos sensores de luminosidade.
Ferramentas Necessárias
- Simulação por Tikercad (opcional);
- SolidWorks (software de modelagem);
- Cortadora a lazer (corte do MDF);
- Impressora 3D (impressão da carapaça do rato);
- Agulha de crochê 1,25 mm;
- x3 marcadores de ponto (crochê);
- Perfurador/Furadeira.
Etapas
Idealização
-
Rascunho
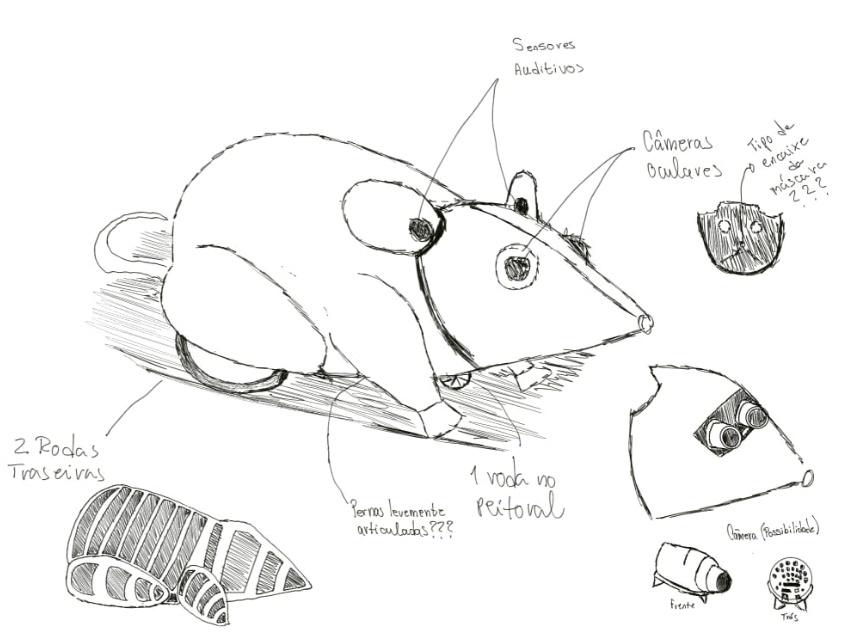
Desenho feito por Leonardo Libano para termos ideia do que queríamos fazer no nosso robô, assim como desejávamos que sua aparência ficasse. Inicialmente, foi pensado o uso de câmeras nos olhos e uma carapaça vazada (como costelas), características essas que foram descartadas após fazermos o mockup do robô, por exigir um investimento muito maior e uma modelagem mais complexa, a qual tomaria muito tempo em comparação ao que tínhamos para produzir o projeto como um todo.
Criação da base de sustentação do sistema
-
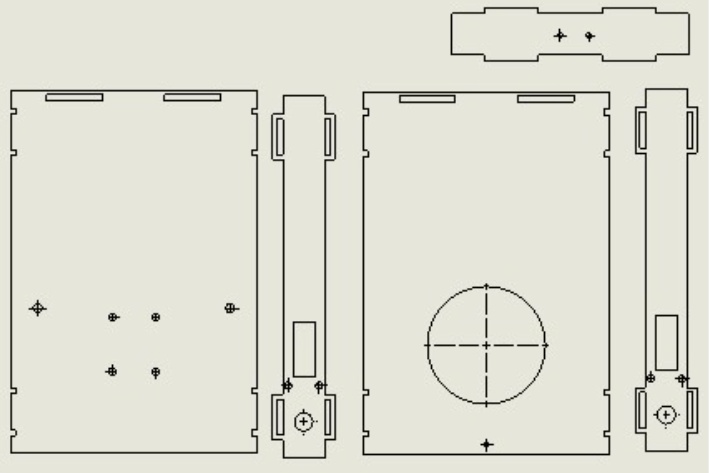
Corte do MDF
Foi escolhido uma placa de MDF para criar a base do robô, pois foi um material de fácil acesso dentro da faculdade, além de ser fácil de cortar com a cortadora a lazer.
Separação dos materiais, modelagem e impressão
-
Modelagem
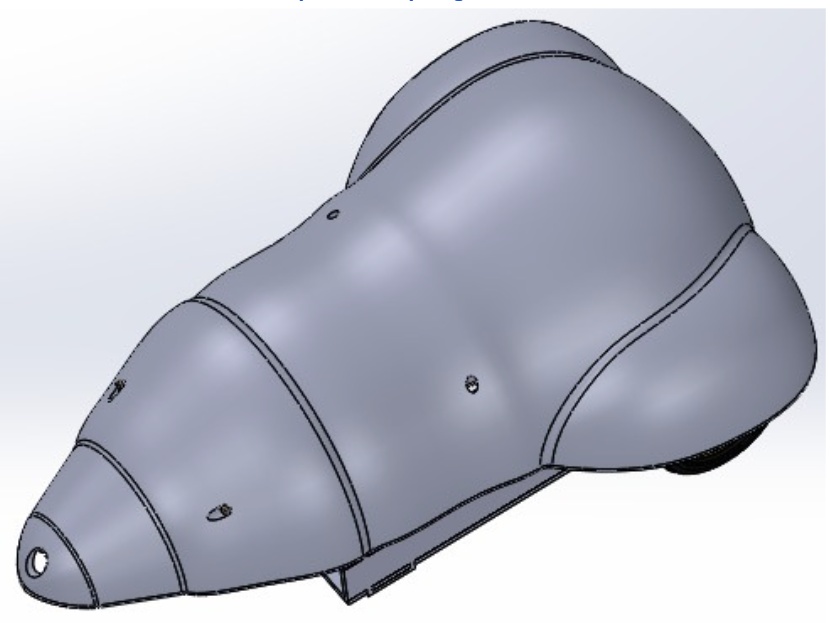
Após avaliarmos quais seriam os sensores e mecanismos que faríamos no robô, foi listado os materiais e ferramentas de uso finais e foi iniciada a modelagem 3D, feita por Rayone Sousa, no SolidWorks.
A modelagem foi feita sem separações a princípio, entretanto foi rejeitada sua impressão por ter ultrapassado o limite de 20h de impressão do FabLab. Foi necessário separar o torço da cabeça e foi adicionado 2 áreas de perfuração em cada uma das partes (4 no total) para serem parafusadas na base final, de modo que pudessem ser retiradas sem danificar o sistema interno.
-
Impressão
A impressão foi feita com filamento de PLA-1,75 na cor branca.

Costura e customização
-
Crochê e rabo
A pelagem foi feita com linha fina cinza de crochê, com com agulha de 1,25 mm. Feita por Rafaela Castelli, a costura não foi feita com receita prévia, nem o corpo e nem as orelhas.
O rabo foi feito com limpador de cachimbo e foi preso por meio de furos que fizemos na parte traseira da impressão.

Montagem do sistema interno
-
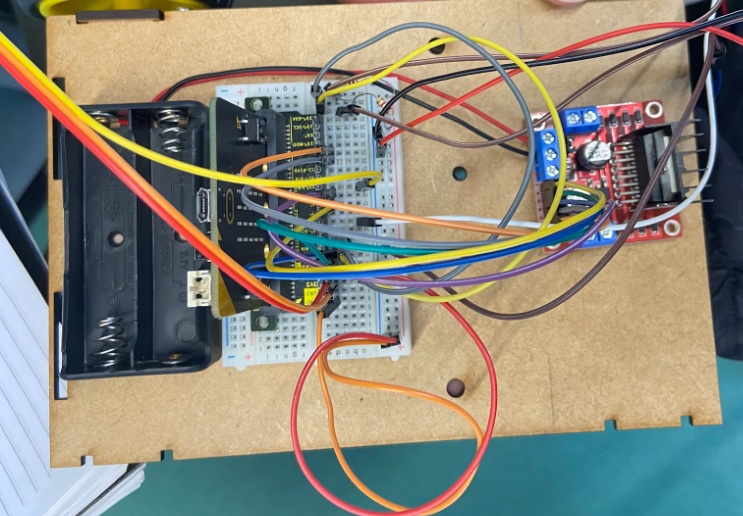
Fiação
A conexão interna é feita por jumpers, os quais servem para ligar todos os sensores e motores à ponte H. O sensor de CO, o led e sensores de luminosidade foram ligados na protoboard e os motores estão ligados à ponte H. Foram usados suportes para baterias, um microbit adaptado para coloca–lo no protoboard e uma bateria que é ligado diretamente no microbit e dois resistores.
Programação
-
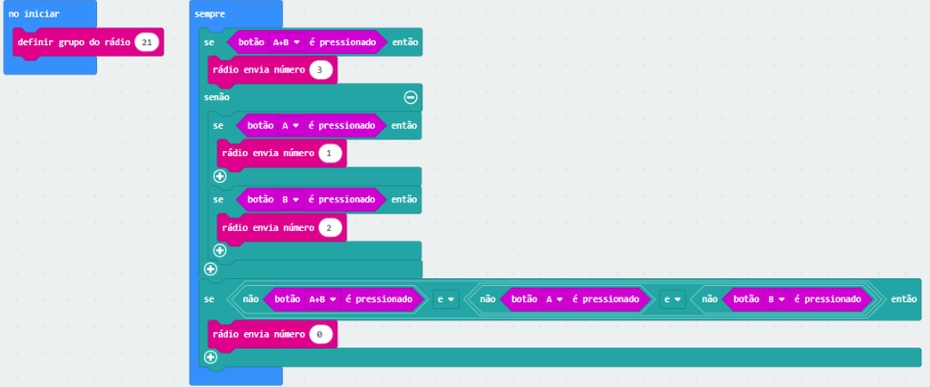
Controle
A programação dos componentes presentes no projeto foram realizadas através da "Microsoft Makercode for micro:bit", uma plataforma online gratuita para aprender a codificação, em linguagem de blocos.
Foram realizados duas programação, uma para cada microbit, a primeira é a responsável por, ao pressionar um botão ou outro, ou os dois, enviar um comando para acionar uma ou roda outra roda, ou as duas, fazendo com que o robô seja controlado por controle remoto.
-
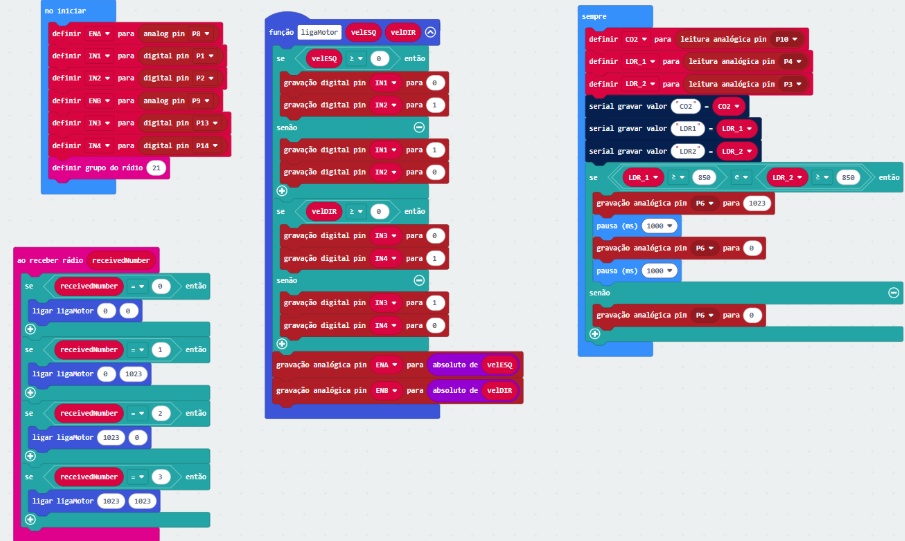
Motores
A segunda programação (principal) foi para controlar os motores, acionamento de LEDs, enviar sinais de rádios, controlar sensores e receber e analisar sinais enviados dos mesmos, e outra, para receber o sinal de rádio e fazer a comunicação entre os microbits.
Conclusão
A construção desse robô foi um processo divertido e cheio de reviravoltas, sendo aplicados diversos conceitos de eletrônica, elétrica e modelagem para a realização dele. além de outras áreas não interligadas diretamente com a engenharia, como o artesanato.
Deve-se acrescentar o fato de que o protótipo não é perfeito, sendo adepto a tombar em áreas íngremes e danificar o sistema interno ou a costura manchar, então ele não deve ser testa em ambientes não controlados. Dessa forma, foi possível produzir um protótipo de um robô de monitoramento de CO para ambientes urbanos em forma de rato.
Comentários
0