

Robô controlado por microbit - caranguejo
Publicado em 8 de Junho de 2026 às 14:25
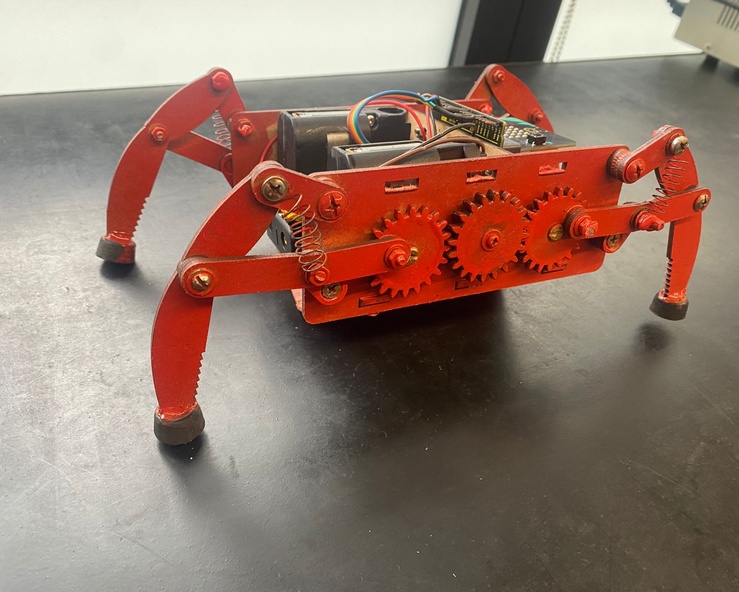
Desenvolver um protótipo biomimético de um caranguejo robótico voltado para o monitoramento ambiental, tendo em vista à vida marinha, com o foco nas irregularidades da temperatura da água. Nesse projeto da disciplina — Engenharia, Sustentabilidade e Impacto Social — o robô cumpre uma função conceitual e ilustrativa, devido a falta de um sensor de temperatura da água e a dificuldade de torná-lo resistente à água e à poeira. Destarte, seu design serve como base para futuros projetos com sistema de vedação e sensores próprios para sua função.
Nesse projeto, o robô será controlado por rádio usando duas placas de micro:bit: uma ficará no robô e a outra será o controle remoto. O caranguejo usa dois motores DC (corrente contínua), uma ponte H e uma estrutura patas articuladas e um sistema de conexão de engrenagens que pode ser feita com materiais de baixo custo ou peças reaproveitadas.
Ao final do projeto, o caranguejo deverá ser capaz de:
- parar;
- mover-se para frete e para trás;
- mudar de direção com o movimento das engrenagens de sentido oposto dos dois pares de patas;
- acionar um alarme quando exposto a temperaturas maior ou igual a 35°C;
- receber comandos por rádio a partir de outro micro:bit.
Esse projeto vai além do que apenas projetar um robô, ajuda a ter noções de eletrônica, de programação, de controle de motores, de desenhos no SolidWorks e noções de conceitos de física para poder realizar o movimento das patas.
O sistema de controle do protótipo baseia-se em dois módulos micro:bit integrados via rádio. O primeiro atua como controle remoto, transmitindo comandos numéricos acionados pelo usuário. O segundo módulo, embarcado no veículo, recebe os sinais e gerencia os motores através de uma ponte H. Este componente é indispensável como interface de potência, visto que o micro:bit não possui capacidade de corrente elétrica suficiente para alimentar diretamente os motores DC (corrente contínua).
Arquivos do Projeto
Captura de tela 2026-05-27 115130.png
733.62 KB
Materiais Necessários
- 2 placas de micro:bit
- 1 ponte H, como L298N ou módulo equivalente
- 1 suporte de pilhas ou bateria para os motores
- 1 protoboard ou placa de conexão
- MDF, impressão 3D, peças LEGO ou material reaproveitado
- 4 molas pequenas
- 2 mini motores DC
- porcas
- parafusos
- pilhas
Ferramentas Necessárias
- paquímetro
- cola super bonder
- cola quente
- chave de fenda
- alicate
Etapas
Contrução do robô
-
Montagem Mecânica
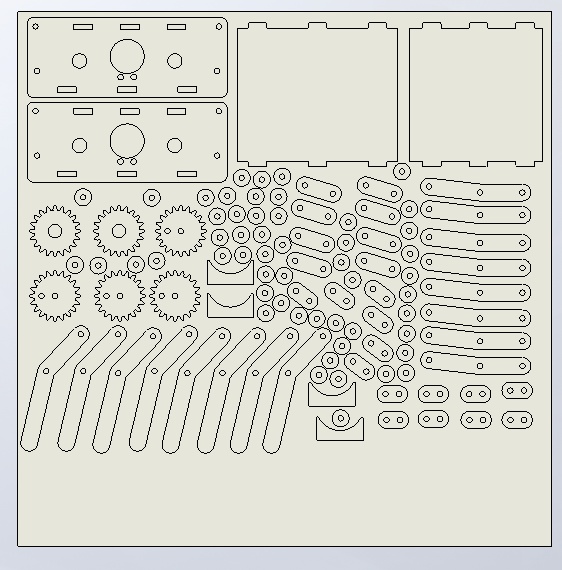
A estrutura do protótipo deve ser construída, preferencialmente, com materiais rígidos e de baixa rugosidade garantindo o funcionamento dinâmico das articulações e minimizando as forças de atrito nos pontos de contato. O alinhamento mecânico exige especial atenção à fixação rígida dos elementos de união (parafusos), evitando folgas estruturais, e ao correto acoplamento entre os dentes das engrenagens, assegurando a transmissão eficiente de torque e movimento. Além disso, em cada ponta das patas deve ter algum tipo de borracha ou material que aumente o atrito do contado da pata com o chão para que não ocorra deslizamento.
-
Montagem Eletrônica
A montagem eletrônica pode ser dividida em três partes:
- conexão do micro:bit com a ponte H;
- conexão da ponte H com os motores;
- alimentação dos motores com uma fonte externa.
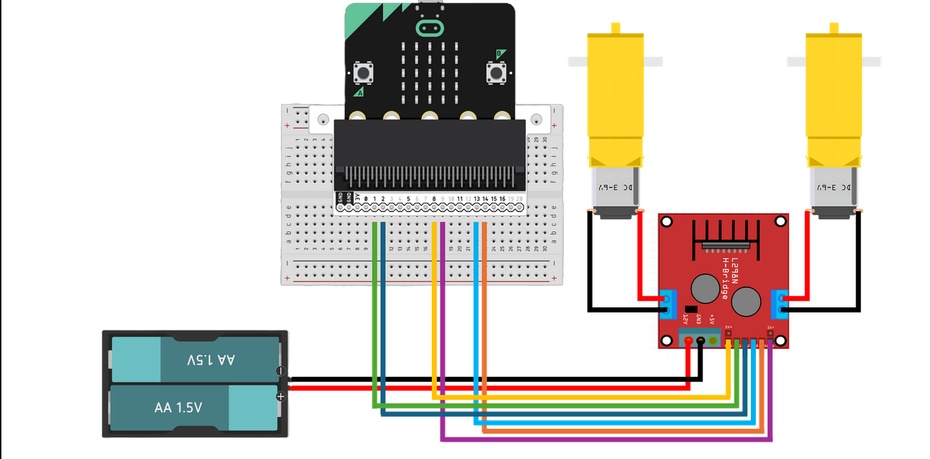
O micro:bit envia sinais para controlar os dois motores por meio de pinos digitais e pinos analógicos/PWM. A ponte H recebe esses sinais e aciona os motores.
Uma possível ligação da Ponte-H e do micro:bit é:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P1
- Sentido do motor esquerdo - IN2: P2
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P13
- Sentido do motor direito - IN4: P14
Atenção: confira sempre a pinagem do seu módulo de ponte H. Alguns módulos podem ter nomes ou posições diferentes para os pinos.
Programação do Robô
-
Micro:bit controlador do robô
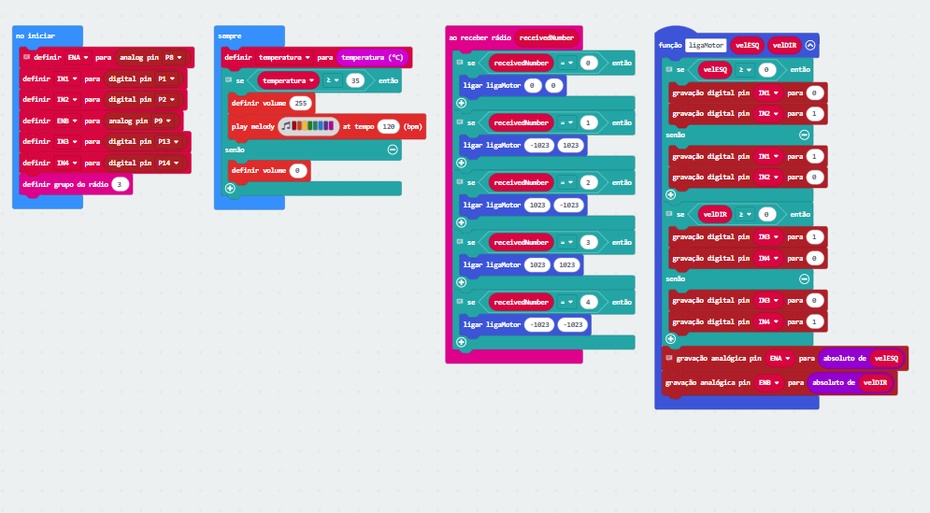
No micro:bit instalado uma de suas funções é ter um sensor de temperatura que serve de alarme sempre quando exposto em temperaturas igual ou superior a 35°C e também transformar seus comando no rádio em movimento.
O programa do micro:bit receptor inicia com a configuração dos pinos da ponte H e a definição do rádio no grupo 3. Na sequência, o sistema processa a lógica de controle, capturando os comandos por rádio e executando a função que aciona os motores conforme o número recebido.
Uma lógica simples para controle do robô pode ser:
- Ao receber 0: parar
- Ao receber 1: aciona sentidos opostos dos motores (virar para esquerda)
- Ao receber 2: acionar sentidos opostos dos motores (virar para direita)
- Ao receber 3: andar para trás
- Ao receber 4: andar para frente
-
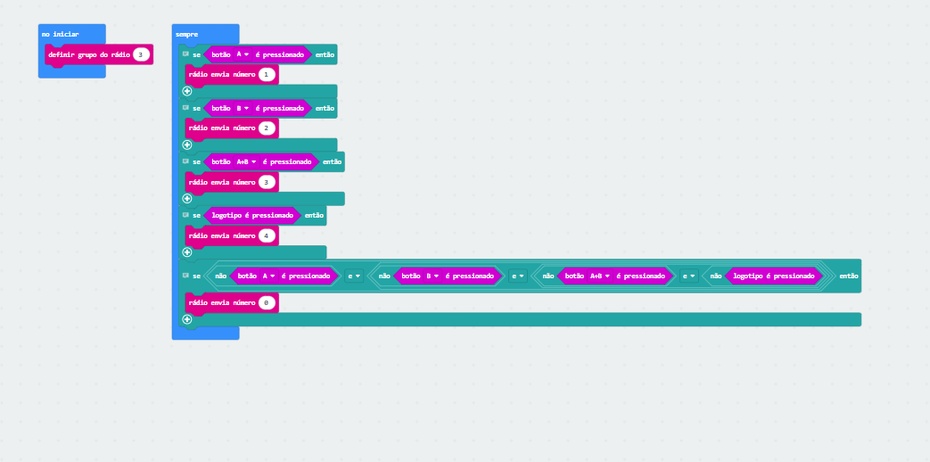
O micro:bit do controle
No programa do controle também é usado o grupo de rádio 3 e é enviados números diferentes quando os botões são pressionados.
Uma sugestão de comandos é:
- Botão A: Envia 1, gira ambas as engrenagens centrais: a da direita anti-horário e o da esquerda horário
- Botão B: Envia 2, gira ambas as engrenagens centrais: a da direita horário e o da esquerda anti-horário
- Botão A+B: Envia 3, avança para trás
- O logotipo: Envia 4, Avança para frente
- Nenhum Botão pressionado: Envia 0, robô parado
Testes e Melhorias Possíveis
-
Testes do Projeto
Primeiro, verificar se o movimento realizado pela engrenagem conectada em cada pata articulada fixada ao corpo e analisar o acoplamento das engrenagens centrais para ver a conexão dos pares de patas.
Além disso, antes de fixar o micro:bit no chassi do robô, deve-se testar se ambos os micro:bits utilizados estão no mesmo grupo de rádio. Em seguida, analisar se o código está tornando possível o funcionamento dos motores.
Durante os teste, observe:
- os motores têm força para girar o acoplamento de engrenagens?
- a transmissão de torque das patas está eficiente?
- o movimento está sincronizado?
- o acoplamento das engrenagens está funcionando?
- o movimento do robô está estável?
- as patas estão escorregando?
- o comando de parar funciona?
- os fios estão bem conectados?
- a ponte H aquece demais? -
Problemas comuns e como resolver
- Problema: As patas não mantem o movimento. Possível causa: folga nos parafusos, o atrito da conexão de torque está impedindo ou o acoplamento das engrenagens está errado. Solução: verificar os parafusos (se necessário, utilizar cola quente ou super bonder por cima dos parafusos), lixar ou fazer uma camada de super bonder nas engrenagens para diminuir o atrito e fazer os cálculos dos dentes e do raio das engrenagens.
- Problema: Os motores não giram após o acoplamento. Possível causa: falta de força no motor, Solução: utilizar motores mais potentes.
- Problema: Só um motor funciona. Possível causa: erro de ligação ou motor com problema. Solução: teste o motor e os fios separadamente.
- Problema: A pata escorrega. Possível causa: material escorregadios e liso. Solução: utilizar borracha na ponta das patas e ajustar a velocidade.
- Problema: O robô não responde ao controle. Possível causa: grupo de rádio diferente nos dois micro:bits. Solução: confira se os dois micro:bits estão usando o mesmo grupo de rádio.
- Problema: O movimento está fraco. Possível causa: pilhas descarregadas ou alimentação inadequada. Solução: troque as pilhas ou utilize uma fonte de alimentação adequada para os motores.
- Problema: O micro:bit reinicia durante o funcionamento. Possível causa: o motor está puxando muita corrente. Solução: separe a alimentação do micro:bit da alimentação dos motores e confira se o GND está comum. -
Melhorias possíveis
Depois que a versão básica estiver funcionando, você pode evoluir o projeto.
Algumas ideias:
- utilizar acrílico para o chassi;
- adicionar comando de movimento para ambos os lados;
- controlar a velocidade dos motores;
- criar um chassi personalizado;
- usar dois sensores ultrassônicos para evitar obstáculos;
Conclusão
A construção deste robô é um excelente primeiro projeto de robótica, pois combina montagem mecânica, eletrônica básica, programação em blocos e comunicação sem fio. Além disso, proporciona uma ótima experiência ao permitir a aplicação prática de conhecimentos técnicos e físicos.
Mesmo contando com uma montagem eletrônica e um programa simples, este projeto serve como base para a criação de robôs mais complexos, integrando novos sensores, maior autonomia e aplicações no mundo real.
A documentação desse robô torna possível que outros estudantes tenham a mesma experiência que meu grupo teve e aprendam com nossas escolhas, erros e testes.
Comentários
0