

Robô controlado por micro:bit (com motor e sensor
Publicado em 2 de Junho de 2026 às 17:09
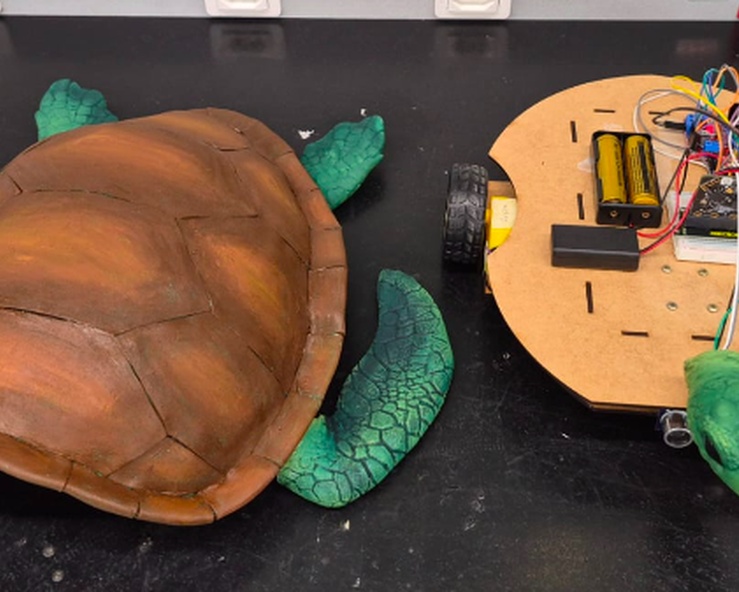
Esse projeto consiste da montagem de um robô composto de um chassi, circuito elétrico com motor e sensor ultrassônico, e a programação de dois micro:bits; um para ser usado como controle remoto e o outro para ficar no robô. Os micro:bit's se comunicaram por rádio. O robô tambem pode ser aderessado da forma que for desejada. Por exemplo, com um casco de tartaruga (feito de papelão) e nadadeiras e cabeça (feitas de impressão 3D)
A proposta foi inspirada em uma atividade da disciplina Engenharia, Sustentabilidade e Impacto Social, do curso de Engenharia de Controle e Automação do Instituto Mauá de Tecnologia, em um contexto de desenvolvimento de robôs para monitoramento de biomas. A construção desse robô foi pensado como um primeiro passo para o monitoramento dos ninhos das tartarugas marinhas, com a programação do micro:bit junto com o sensor ultrassônico funcionando juntos para alertar sobre possiveis ameaças aos ninhos.
O objetivo desse projeto é construir um carrinho robótico simples, capaz de receber comandos sem fio enviados por outro micro:bit .
Tambem, o carrinho sera capas de:
- parar;
- girar ou mover suas rodas de forma independente;
- andar para frente usando os dois motores;
- receber comandos por rádio a partir de outro micro:bit;
-alertar sonoramente e visualmente qualquer presença a 40cm ou menos dele mesmo.
Materiais Necessários
- 2 placas micro:bit
- 1 ponte H, como L298N ou módulo equivalente
- 2 motores DC com caixa de redução
- 2 rodas compatíveis com os motores
- 1 suporte de pilhas ou bateria para os motores
- 1 protoboard ou placa de conexão
- vários jumpers macho-macho e macho-fêmea - para referência,; nesse projeto foram utilizados 16 jumpers macho-fêmea
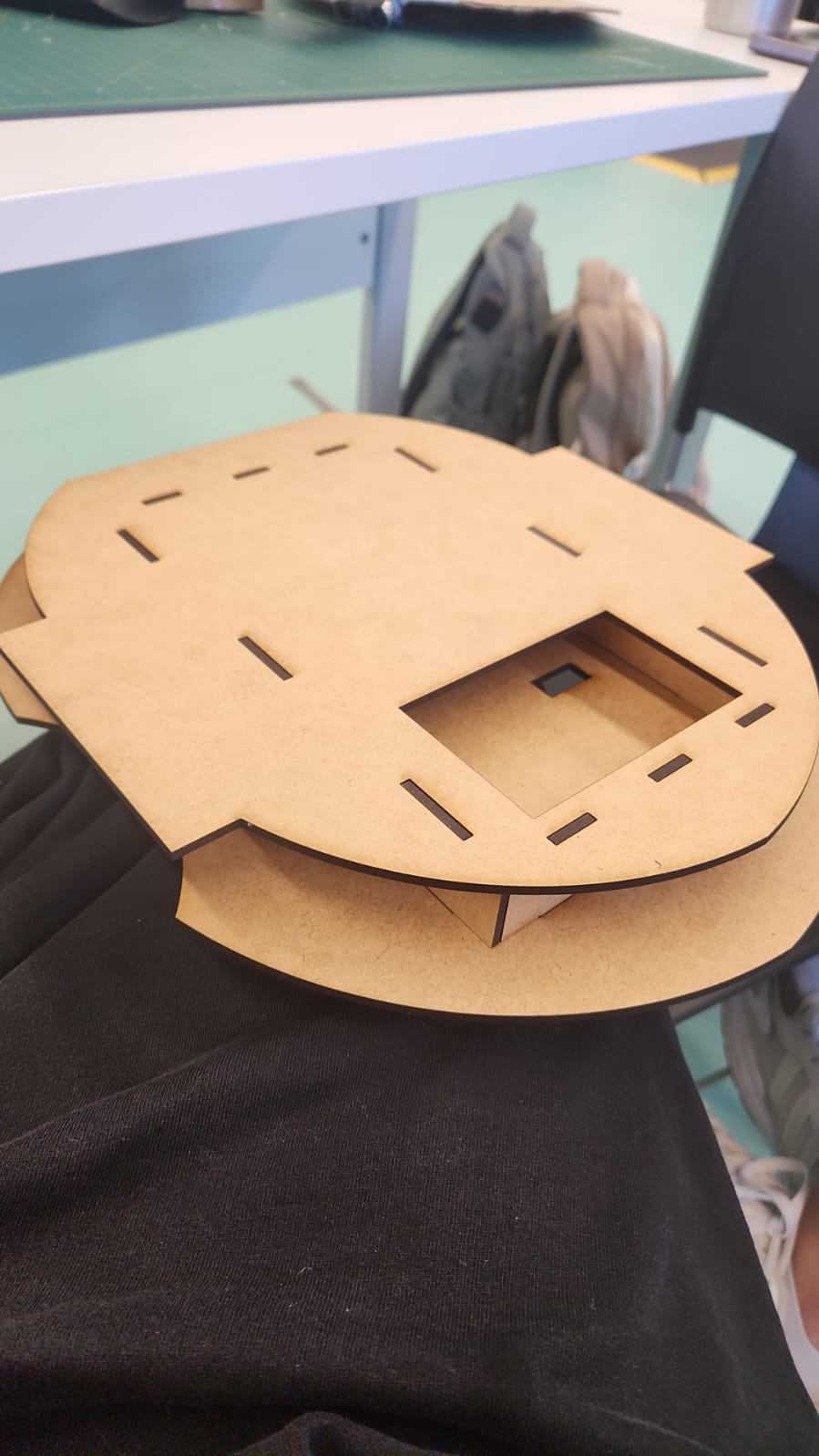
- 1 chassi para o carrinho - o chassi desse projeto foi feito de mdf cortado a laser
- 1 rodízio, esfera ou apoio frontal/traseiro
- 1 sensor ultrassônico HC-SR04
- 1 regulador de tensão LM-7805
- opcional papelão, MDF, impressão 3D, material reaproveitado, qualquer material cuja sua criatividade possa pensar ficaria descolado decorando ou escondendo seu chassi
Ferramentas Necessárias
- Chave de fenda
- possivelmente:
- alicate
- estilete
- cola quente
Etapas
Construção do robô
-
Montagem mêcanica:
O chassi pode ser construido a partir da sua criatividade, com materiais como papelão rígido, MDF cortado a laser, peças impressas em 3D, peças de kits educacionais ou materiais reaproveitados. O importante é que a estrutura mantenha os motores fixados, permita que as rodas se movimentem livremente, e que ela aguente o peso de todos os componentes do robô. No nosso projeto, o chassi foi projetado com o software Solidworks e feito de MDF cortado a laser.
-
Montagem eletrônica:
A montagem eletrônica pode ser dividida em quatro etapas:
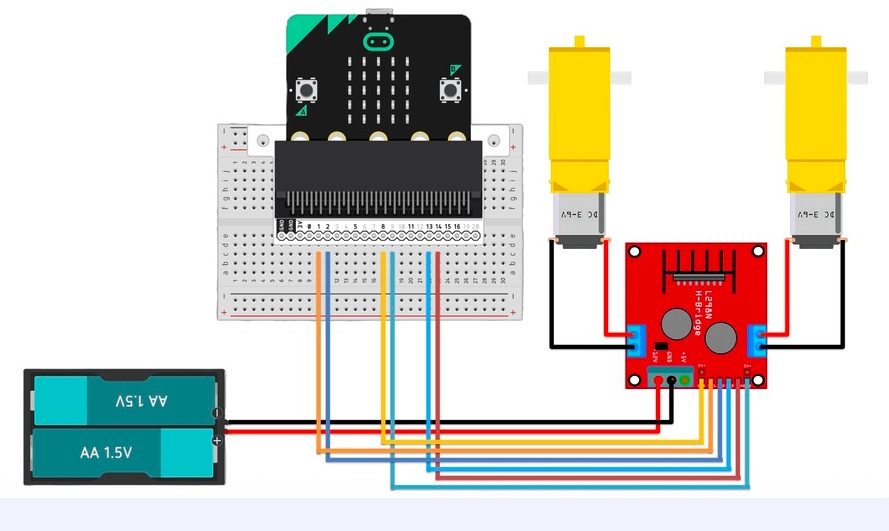
- conexão do micro:bit com a ponte H;
- conexão da ponte H com os motores;
- alimentação dos motores com uma fonte externa.
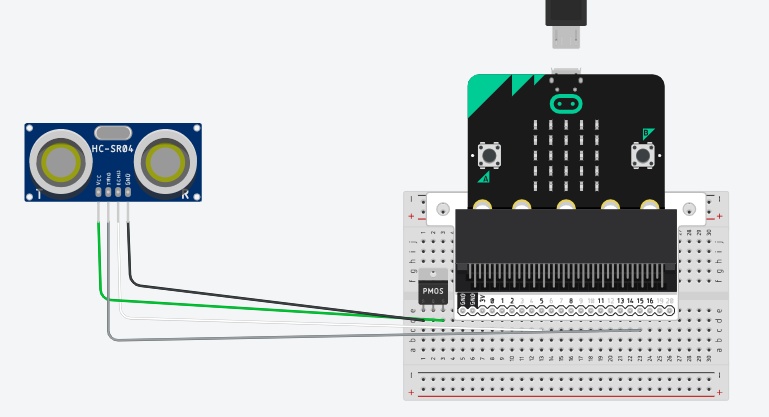
- conexão do sensor ultrassônico com o microbit
Para a conexão da ponte H com o micro:bit, uma possivel ligação é:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P1
- Sentido do motor esquerdo - IN2: P2
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P13
- Sentido do motor direito - IN4: P14
Atenção: confira sempre a pinagem do seu módulo de ponte H. Alguns módulos podem ter nomes ou posições diferentes para os pinos.
-
Conexão do sensor com o micro:bit
Uma possivel ligação é:
- GND do sensor com o negativo do regulador de tensão
- Vcc do sensor com o positivo do regulador de tensão
- TRIG do sensor: P15
- ECHO do sensor : P5
O regulador de tensão é necessario por que a tensão do sensor é o dobro da tensão do micro:bit
Os pinos utilizados podem ser modificados, mas vão ser referienciados na programação.
Programação
-
Programação do micro:bit controlando o robô
O micro:bit instalado no robô deve; receber comandos por rádio, transformar esses comandos em movimento, e monitorar os dados recebidos pelo sensor.
Sendo assim, a programação desse micro:bit pode ser sub-dividida em 3 etapas:
- Programção do método de inicio
- Programação da locomoção do robô
- Programação do sensor -
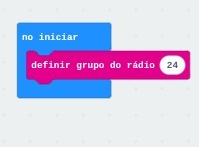
Programação do método de inicio:
Nessa parte, a programação deve:
- Conectar o micro:bit com o sensor e estabelecer por quais pinos ele vai receber os inputs TRIG e ECHO do sensor
- Estabelecer por quais pinos o micro:bit vai receber quais inputs da ponte H e por quais pinos vai mandar informações para a ponte H
- Definir o grupo de radio em qual os dois micro:bit's vão se comunicar
- Criar uma variável para a distância que o sensor vai monitorar
Um exemplo de um código que faz isso está na imagem abaixo

-
Programação da locomoção do robô:
A lógica simples para essa locomoção é:
- Ao receber 0: parar
- Ao receber 1: acionar motor direito (virar para esquerda)
- Ao receber 2: acionar motor esquerdo (virar para direita)
- Ao receber 3: andar para frente
- Ao receber 4: andar para trás
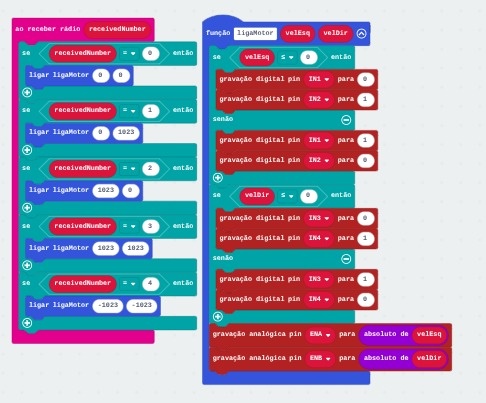
-
Programação do sensor do robô:
A lógica simples para o sensor é que se ha algo a menos de 40cm do sensor, o micro:bit deve emitir um som. Se não, o micro:bit não deve fazer nada.

-
Programação do micro:bit de controle
Essa progrmação tambem pode ser sub-dividida como o método de iniciação e o resto da programação do micro:bit
Ao iniciar, o controle deve simplesmente estabelecer qual grupo de rádio ele está utilizando
-
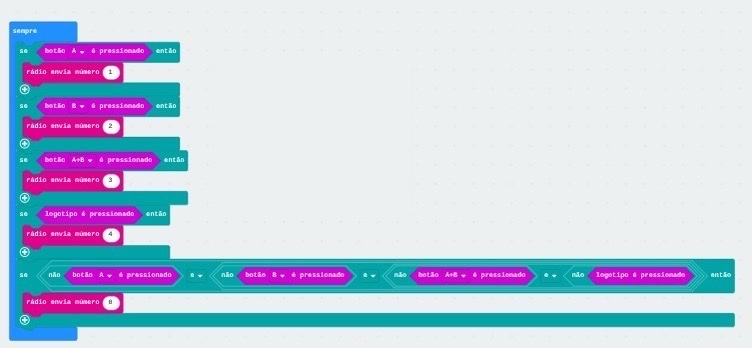
Programação do micro:bit de controle
A lógica para programar o resto do controle é
- Quando o botão A é pressionado: enviar número 1 para o outro micro:bit
- Quando o botão B é pressionado: enviar número 2 para o outro micro:bit
- Quando o botão A e B é pressionado: enviar número 3 para o outro micro:bit
- Quando o logotipo é pressionado: enviar número 4 para o outro micro:bit
- Se nada for pressionado: enviar o número 0
Testes e Melhorias Possíveis
-
Testes do projeto:
Antes de prender tudo no chassi, teste o circuito em etapas.
Primeiro, verifique se os dois micro:bits estão no mesmo grupo de rádio. Depois, teste se o micro:bit do robô está recebendo os números enviados pelo controle. Em seguida, conecte apenas um motor e veja se ele gira. Depois, teste o segundo motor. Teste tambem se o sensor está funcionando conforme desejado. Só então fixe os componentes no carrinho.
Durante os testes, observe:
- os motores estão girando?
- os motores giram no sentido esperado?
- o robô anda reto?
- o comando de parar funciona?
- a alimentação dos motores está adequada?
- os fios estão bem conectados?
- a ponte H aquece demais? -
Problemas comuns e suas soluções:
- Problema: O motor não gira. Possível causa: falta de alimentação externa. Solução: verifique as pilhas, a bateria e se o GND está comum entre os circuitos.
- Problema: Só um motor funciona. Possível causa: erro de ligação ou motor com problema. Solução: teste o motor e os fios separadamente.
- Problema: O robô gira em vez de andar reto. Possível causa: motores girando em sentidos opostos. Solução: inverta os fios de um dos motores ou ajuste o programa.
- Problema: O robô não responde ao controle. Possível causa: grupo de rádio diferente nos dois micro:bits. Solução: confira se os dois micro:bits estão usando o mesmo grupo de rádio.
- Problema: O movimento está fraco. Possível causa: pilhas descarregadas ou alimentação inadequada. Solução: troque as pilhas ou utilize uma fonte de alimentação adequada para os motores.
- Problema: O micro:bit reinicia durante o funcionamento. Possível causa: o motor está puxando muita corrente. Solução: separe a alimentação do micro:bit da alimentação dos motores e confira se o GND está comum. -
Depois que a versão básica estiver funcionando, você pode evoluir o projeto.
Algumas ideias:
- controlar a velocidade dos motores;
- criar um chassi ou carenagem personalizado;
- usar sensor ultrassônico para evitar obstáculos;
- adicionar LEDs indicadores;
- criar uma garra ou mecanismo simples.
Conclusão
Esse é um projeto que permite a combinação de montagem física, eletrônica básica e programação, intorduzindo uma base de conhecimentos que permite a criação de robôs mais completos.
Comentários
0