

Robô Monitorador de biomas: Tartaruga Marinha
Publicado em 2 de Junho de 2026 às 23:33
O nosso projeto consiste no desenvolvimento de um robô monitorador para ajudar na preservação das tartarugas marinhas. A ideia é que ele fique na faixa de areia da praia, acompanhando o ambiente sem atrapalhar o caminho natural dos filhotes até o mar.
O robô utilizaria componentes simples, como micro:bit, motores DC, ponte H e sensores. O micro:bit seria responsável por controlar o sistema, enquanto a ponte H controlaria os motores, permitindo que o robô se movimentasse, parasse e mudasse de direção.
Além disso, o robô teria sensores para medir a temperatura e umidade do ambiente e identificar a presença de lixo na areia. Com essas informações, seria possível analisar melhor as condições da praia e ajudar em ações de preservação ambiental.
Dessa forma, o projeto une tecnologia, robótica e sustentabilidade, mostrando como a engenharia pode contribuir para a proteção das tartarugas marinhas e dos biomas costeiros.
Materiais Necessários
- 2 placas micro:bit
- 1 Micro:bit Adapter para Protoboard
- 1 Ponte H L298N
- 2 motores DC com caixa de redução
- 1 Sensor DHT-11
- 1 Sensor ultrassônico HC-SR04
- 1 Regulador de tensão LM7805
- 1 Resistor
- 1 Protoboard
- 1 suporte de pilhas ou baterias para os motores
- 2 suportes para pilha Aaa com conector Jst para micro:bit
- Vários jumpers macho-macho e macho-fêmea
Ferramentas Necessárias
- Chave de fenda
- Alicate
- Cola Super Bonder para madeira
- Cola quente
Etapas
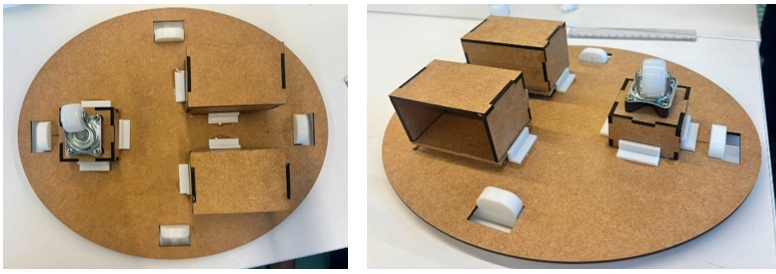
Construção do Robô
- O chassi utilizado foi montado usando uma base circular de MDF (podem ser utilizados outros materiais) cortada no formato aproximado do casco da tartaruga. Essa peça será a estrutura principal do robô, onde todos os componentes eletrônicos serão fixados.
- Defina os locais onde os motores serão posicionados na base. Antes de fixá-los, planeje também os suportes que irão segurá-los.
-
Construa os suportes dos motores (três caixas ou estruturas de apoio). Eles podem ser feitos com:
• MDF cortado a laser;
• peças impressas em 3D;
• papelão rígido. - Fixe os suportes embaixo da base de MDF e depois prenda os motores neles. É importante garantir que os motores estejam bem alinhados e firmes.
- Deixe espaços adequados entre as rodas e a base. Esse espaço é necessário para que as rodas girem livremente.
-
Adicione as peças de apoio, trava ou guia (utilizamos peças impressas em 3D). Essas peças ajudam a manter a estrutura mais firme e organizada. Elas podem ser:
• coladas;
• parafusadas;
• encaixadas, dependendo do material utilizado. -
Após a montagem, verifique:
• se todas as peças estão bem fixadas;
• se as rodas giram livremente;
• se os motores estão alinhados;
• se a base possui tamanho compatível com o casco externo da tartaruga. -
Por fim, é importante verificar se todas as partes estão bem fixadas, se as rodas giram sem atrito com a base e se a base tem aproximadamente o mesmo tamanho do casco externo da tartaruga. Assim, quando o casco for colocado por cima, ele vai encaixar corretamente sem atrapalhar o movimento do robô.
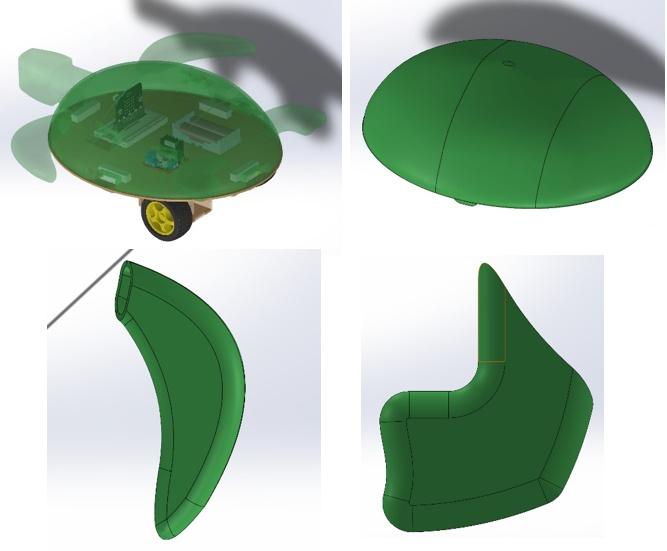
SolidWorks
-
A cabeça, as patas e o casco da tartaruga foram modelados no programa SolidWorks. Esse software permite criar modelos em 3D de acordo com a necessidade do projeto, possibilitando desenvolver peças com diferentes formatos e tamanhos. Nele, é possível fazer a modelagem que quiser, ajustando o desenho até chegar ao formato desejado para depois realizar a impressão 3D das peças.
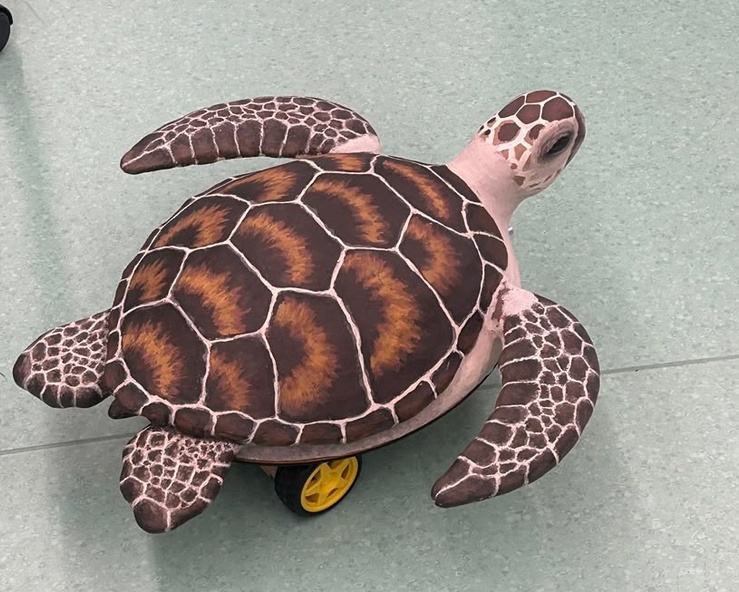
Personalização
-
A personalização da tartaruga foi feita com massinha de EVA, aplicada por cima das peças impressas em 3D. Esse material ajudou a modelar melhor o formato do casco, da cabeça e das nadadeiras, deixando a aparência mais detalhada. Depois da modelagem, a peça foi pintada com tinta, para dar um acabamento mais realista e deixar a tartaruga com um visual mais próximo de uma tartaruga marinha.

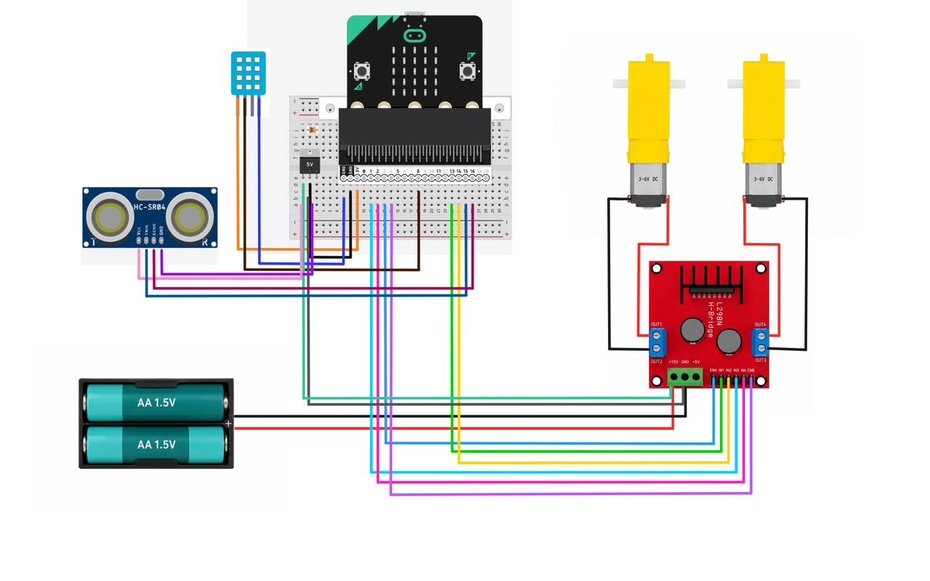
Montagem eletrônica
-
A ideia geral é:
micro:bit = transmissor e receptor
HC-SR04 = sensor de distância
DHT-11 = sensor de temperatura e umidade
resistor = proteção/adaptação de tensão
LM7805 = regulador de tensão
L298N = controle dos motores
baterias = alimentação -
Micro:bit:
O micro:bit fica encaixado na protoboard por meio de uma placa expansora (Micro:bit Adapter). Ele é responsável por receber os sinais dos sensores e mandar comandos para a ponte H.
Ele envia sinais digitais para o módulo L298N, dizendo se os motores devem girar para frente, para trás, parar ou virar. -
Sensor ultrassônico HC-SR04:
O sensor HC-SR04 mede distância usando som.
Ele possui quatro pinos principais:
• VCC: alimentação;
• GND: terra;
• TRIG: recebe um pulso do micro:bit;
• ECHO: devolve um sinal para o micro:bit indicando o tempo que o som demorou para voltar.
O micro:bit manda um sinal pelo pino TRIG. O sensor emite uma onda ultrassônica. Quando essa onda bate em um objeto e volta, o sensor manda um sinal pelo pino ECHO. O micro:bit usa esse tempo para calcular a distância. -
Sensor DHT11:
O DHT11 é um sensor usado para medir temperatura e umidade do ar.
O DHT11 possui normalmente três pinos principais:
• VCC: alimentação do sensor;
• GND: terra/negativo;
• DATA/SINAL: envia as informações para o micro:bit.
A temperatura medida é dada em graus Celsius (°C).
Já a umidade do ar é dada em porcentagem (%). -
Por que existe um resistor no circuito?
O sensor HC-SR04 normalmente trabalha com 5 V, e o sinal de saída do pino ECHO também pode chegar perto de 5 V. O problema é que os pinos do micro:bit trabalham com aproximadamente 3,3 V. Então, se você ligar o ECHO de 5 V direto no micro:bit, pode danificar a placa. Por isso, usa-se resistor para reduzir ou limitar a tensão/sinal que chega no micro:bit. -
Regulador de tensão LM7805:
O LM7805 é um regulador de tensão. A função dele é transformar uma tensão maior e variável em uma saída estável de 5 V.
Ele está ali porque alguns componentes do circuito precisam de 5 V para funcionar corretamente.
Sem o regulador, a tensão da bateria poderia variar e causar mau funcionamento no sensor ou na ponte H.
Mas atenção: o LM7805 precisa receber uma tensão maior que 5 V para conseguir regular. Normalmente ele precisa de algo em torno de 7 V ou mais na entrada para entregar 5 V estáveis. -
Ponte H L298N:
A placa vermelha é a ponte H L298N. Ela serve para controlar os motores DC.
O micro:bit sozinho não consegue alimentar motores diretamente, porque os motores puxam mais corrente do que os pinos do micro:bit suportam. Por isso usamos a ponte H.
Os motores estão conectados nas saídas da ponte H: um motor em OUT1 e OUT2 e outro motor em OUT3 e OUT4.
Os fios de controle vindos do micro:bit entram nos pinos: IN1, IN2, IN3 e IN4
Dependendo da combinação dos sinais, os motores giram em sentidos diferentes.
Exemplo simplificado:
IN1 IN2 Motor
1 0 gira para um lado
0 1 gira para o outro lado
0 0 parado -
OBS.: para o funcionamento conectar um dos suportes para pilha AAA com conector JST no micro:bit do robô e o outro no micro:bit do controle.
Programação do robô
-
O micro:bit controlador do robô
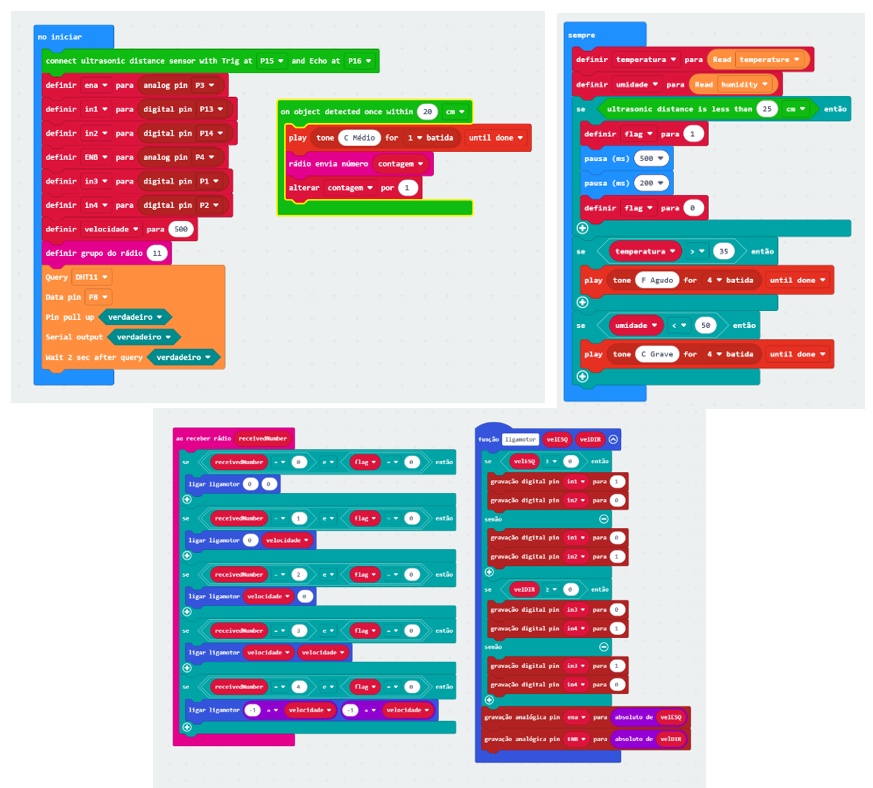
No iniciar:
• O sensor ultrassônico é configurado: TRIG no P15 e ECHO no P16.
• São definidos os pinos da ponte H:
o IN1 no P13, IN2 no P14, IN3 no P1 e IN4 no P2: controlam o sentido dos motores.
o ENA no P3 e ENB no P4: controlam a velocidade dos motores (definida com o valor 500).
• O rádio é configurado no grupo 11, isso permite que o micro:bit do robô receba comandos de outro micro:bit.
• O sensor DHT11 é configurado no pino P8.
• Também existe uma função para detectar objetos a até 20 cm. Quando um objeto é detectado: o micro:bit toca um som, envia o número da contagem pelo rádio e aumenta a contagem em 1.
Sempre:
• Primeiro, o micro:bit lê a temperatura do sensor DHT11. O valor da temperatura é guardado na variável temperatura.
• Depois, o micro:bit lê a umidade do sensor DHT11. A umidade registrada é guardada na variável umidade.
• Depois, o sensor ultrassônico verifica se existe algum objeto próximo.
• Se a distância for menor que 25 cm: a variável flag recebe o valor 1, isso indica que existe um obstáculo perto do robô.
• Depois de um pequeno tempo, a variável flag volta para 0.
• Também existe uma verificação da temperatura: se a temperatura for maior que 35 °C, o micro:bit irá fazer um som 4 vezes de alerta.
• E uma verificação da umidade: se a umidade estiver menor do que 50%, o micro:bit irá fazer um som 4 vezes de alerta.
Ao receber rádio:
• O outro micro:bit funciona como transmissor.
• O micro:bit do robô funciona como receptor.
- Se o número recebido for 0: o robô para.
- Se o número recebido for 1: o robô gira para um lado.
- Se o número recebido for 2: o robô gira para o outro lado.
- Se o número recebido for 3: o robô anda para frente.
- Se o número recebido for 4: o robô anda para trás.
• Esses comandos só funcionam se a variável flag estiver em 0. Isso significa que o robô só se movimenta se não tiver obstáculo muito próximo.
Função ligar motor:
• Essa função controla os dois motores do robô.
• Ela recebe dois valores: velocidade do motor esquerdo e velocidade do motor direito.
• Exemplo de como funciona o motor:
IN1 IN2 Motor
1 0 gira para um lado
0 1 gira para o outro lado
0 0 parado
• Os pinos IN1 e IN2 controlam um motor.
• Os pinos IN3 e IN4 controlam o outro motor.
• Os pinos ENA e ENB controlam a intensidade da velocidade dos motores.
-
O micro:bit do controle:
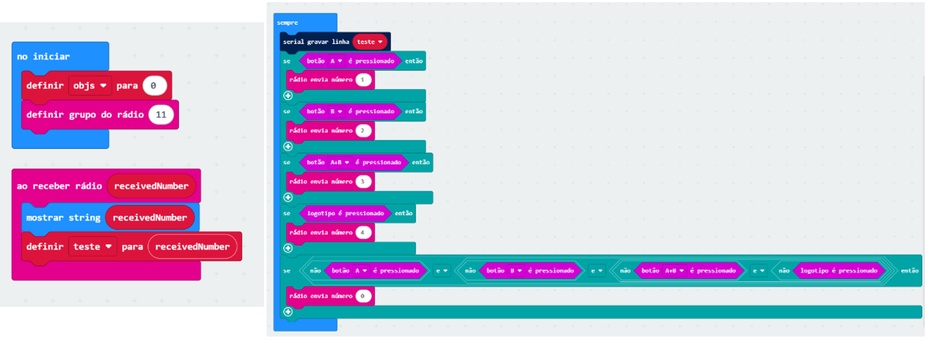
No iniciar:
• A variável objs é definida como 0. Essa variável pode ser usada para contar objetos detectados pelo robô.
• O grupo do rádio é definido como 11. Isso significa que esse micro:bit só vai se comunicar com outros micro:bits que também estejam no grupo 11.
• O grupo de rádio funciona como um “canal” de comunicação.
• Essa configuração é importante para que o controle e o robô consigam se comunicar sem fio.
Ao receber rádio:
• O valor recebido fica guardado na variável receivedNumber.
• O bloco mostrar string receivedNumber faz o número recebido aparecer na tela de LEDs do micro:bit.
• Depois, a variável teste recebe o valor de receivedNumber. Isso serve para guardar a informação recebida e permitir que ela seja usada em outras partes do programa.
Sempre:
• Ela verifica quais botões estão sendo pressionados.
• Dependendo do botão apertado, o micro:bit envia um número pelo rádio para o robô.
• Se o botão A for pressionado: o micro:bit envia o número 1 pelo rádio.
• Se o botão B for pressionado: o micro:bit envia o número 2 pelo rádio.
• Se os botões A + B forem pressionados: o micro:bit envia o número 3 pelo rádio.
• Se o logotipo do micro:bit for pressionado: o micro:bit envia o número 4 pelo rádio.
• Se nenhum botão estiver sendo pressionado: o micro:bit envia o número 0 pelo rádio. O número 0 normalmente é usado para indicar que o robô deve ficar parado.
Essa é uma versão inicial simples do controle. Depois que o carrinho estiver funcionando, o programa pode ser melhorado para deixar a direção mais intuitiva e mais fácil de controlar.
Testes e Melhorias Possíveis
-
Testes do projeto:
Antes de prender tudo no chassi, deve-se testar o circuito:
• Verificar se os dois micro:bits estão configurados no mesmo grupo de rádio, do controle e do robô.
• Para confirmar a comunicação, teste se o micro:bit do robô está recebendo corretamente os sinais enviados pelo micro:bit do controle.
• Para verificar se os motores estão respondendo corretamente aos comandos enviados conecte apenas um dos motores à ponte H e teste seu funcionamento utilizando os comandos do controle. Depois, desconecte o primeiro motor e realize o mesmo teste com o segundo motor.
• Se o motor estiver girando para o lado contrário, terá que inverter os fios de um motor que estão conectados na ponte H ou ajustar a lógica dos pinos IN1, IN2, IN3 e IN4.
• Verificar se os sensores colocados no circuito estão recebendo sinal conforme o esperado.
• Antes de fixar definitivamente os componentes, verifique os fios e confirme que nenhuma conexão está frouxa ou em risco de se soltar durante o movimento.
• Por fim, fixe todos os componentes no carrinho do robô.
Observações importantes durante os testes:
• Os dois motores estão girando?
• Os motores giram no sentido esperado?
• Os sensores estão funcionando?
• Os fios estão bem conectados?
• A alimentação do circuito está adequada para os motores e para os micro:bits? -
Problemas comuns e como resolver:
• O motor funciona sozinho, mesmo sem estar ligado diretamente a uma alimentação externa:
Isso pode acontecer quando existe alguma ligação errada no circuito, fazendo com que a energia chegue ao motor por um caminho que não deveria. Provavelmente ele está recebendo alimentação indiretamente por outro ponto do circuito, como pelo VCC, pela ponte H, pelo micro:bit ou por algum fio conectado no lugar errado.
Possível solução: Verificar todas as conexões de alimentação do circuito. O ideal é conferir se o pino que está recebendo energia está no local correto. Caso o VCC esteja ligado no ponto errado, ele pode alimentar o motor sem que o comando do micro:bit seja enviado. Nesse caso, deve-se trocar o fio de alimentação para o pino correto e garantir que o motor só funcione quando receber o comando programado.
• O robô não se movimenta:
Possível solução: conferir se as conexões na ponte H estão certas, verificar se a lógica dos pinos IN1, IN2, IN3 e IN4 está correta, verificar as pilhas e os motores.
• Apenas um motor funciona:
Possível solução: verificar se os fios estão conectados corretamente ou se há algum problema no código, testando cada motor individualmente.
• O sensor ultrassônico não detecta os obstáculos corretamente:
Possível solução: Analisar o código, verificar as conexões dos fios e os pinos TRIG e ECHO.
• Pinos queimados:
Possível solução: caso o pino não esteja funcionando, troque o pino utilizado e não esqueça de trocar no código também. -
Melhorias possíveis:
O robô pode receber diversas melhorias futuramente, tornando-o mais completo e funcional, por exemplo:
• Desenvolver um casco mais resistente, à prova d´água;
• Base mais resistente;
• Sensor de movimento para detectar a trajetória das tartarugas até o mar;
• Sensor aéreo para detectar predadores;
• Utilizar uma bateria solar;
• Rodas mais resistentes para um ambiente de praia;
• Criar um aplicativo para o controle remoto.
Conclusão
O projeto do robô tartaruga permitiu aplicar conceitos de mecânica, eletrônica, programação e modelagem 3D para construir um robô capaz de simular o monitoramento de biomas.
Durante o desenvolvimento, foram utilizados sensores, ponte H que controla os motores, comunicação via rádio entre micro:bits e softwares de modelagem para a estrutura, possibilitando a construção de um robô funcional e personalizado.
Além da parte técnica, o projeto também contribuiu muito para o desenvolvimento de habilidades importantes de engenharia, como trabalho em equipe, resolução de problemas, organização e planejamento. No decorrer do projeto, foi possível ter, de forma criativa e interativa, uma experiência educativa única de engenharia.
Comentários
1ficou incrível parabéns! 👏👏👏