

Veículo com braço robótico
Publicado em 25 de Outubro de 2025 às 10:41
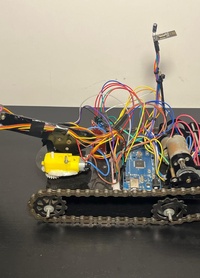
Este projeto consiste em um robô manipulador operado por rádio frequência, composto por uma plataforma veicular do tipo esteira e um braço robótico multifuncional. O sistema é integralmente controlado por dois joysticks, permitindo alta manobrabilidade da base(muito semelhante a um tanque de guerra) e rotação em seu próprio eixo (pivotagem). O braço robótico possui múltiplos graus de liberdade, possibilitando o controle de seus segmentos isoladamente — como o giro de 360º da base, a articulação da 'haste principal' (lança) e 'secundária' (antebraço) — além da rotação do punho e a operação da garra (abertura e fechamento)."
Arquivos do Projeto
Materiais Necessários
- Motor principal
- Arduino Mega
- Arduino Uno
- 2 Módulos NRF24L01
- Jumpers
- 2 Ponte H
- 2 Joysticks
- Bateria 7.2v 5000mAh NiMH
- 4 Servo motores
- Motor com redução
- Barra roscada
- Arruelas
- Porcas
- Parafusos
- Engrenagens
- Base de PVC
- Tubo quadrado de aço
- Roldanas de câmbio de bicicleta
- Corrente de bicicleta
- Chapa de PVC
- Chapa de alumínio
Ferramentas Necessárias
- Pistola de cola quente
- Arco de serra
- Chave Philips
- Furadeira
Etapas
Estrutura
- Cortar um pedaço de cano de PVC, colocar no forno(CUIDADO!!!) e esperar até que esteja maleável como um todo, após isso, prensar para formar a chapa.
- Cortar o tubo de aço que servirá como "chassis" do robô, onde será presa a base e os eixos.
Construir a estrutura do braço
Comunicação por rádio frequência
Acionamento e controle dos motores
Conclusão
OBS: Não detalhei muito a construção, pois é muito específica. Usei os materiais que encontrei; por exemplo, as engrenagens usadas para girar a base do braço foram retiradas de uma impressora.
Usei um parafuso sem cabeça para fixar a engrenagem do tipo rosca sem fim no servo modificado e, com duas engrenagens gêmeas, construí o mecanismo que abre/fecha a garra. Ou seja, essas adaptações (gambiarras) nem sempre são as melhores ou mais eficientes, mas sim as que estavam ao meu alcance.
Dicas:
Se for fazer um projeto parecido, comece aprendendo a mexer com as três partes principais:
Veículo: Motores principais e Ponte H
Braço Robótico: Servos motores
Comunicação: Módulos de rádio frequência
Além disso, progrida gradativamente. Olhe o caso do módulo de rádio frequência, por exemplo: instale a biblioteca correta, teste uma comunicação simples, depois uma comunicação com mais dados, pesquise formas de deixar a comunicação mais eficiente... e por aí vai.
O módulo Ponte H tem uma saída de 5v padrão que pode ser usada para alimentar o Arduino. A maioria das baterias são fortes demais para serem ligadas diretamente nele, mas a Ponte H regula a tensão internamente e expõe esse sinal em uma das portas (saída 5v) que você pode usar para alimentar o Arduino.
O aterramento entre cada um dos componentes é muito importante e quase sempre passa despercebido. Por exemplo, os servos que usei são alimentados pela bateria, mas devem estar aterrados no Arduino também. O mesmo vale para a Ponte H.
Espero que esse projeto ajude minimamente, com uma ideia, trecho de código ou qualquer coisa. Boa exploração do magnífico mundo maker!
Comentários
1como isso não viralizou?